Laboratorium mechatroniki I (2M339)

Opiekun: prof. dr hab. inż. P. Olejnik
Stanowisko |
Materiały |
|
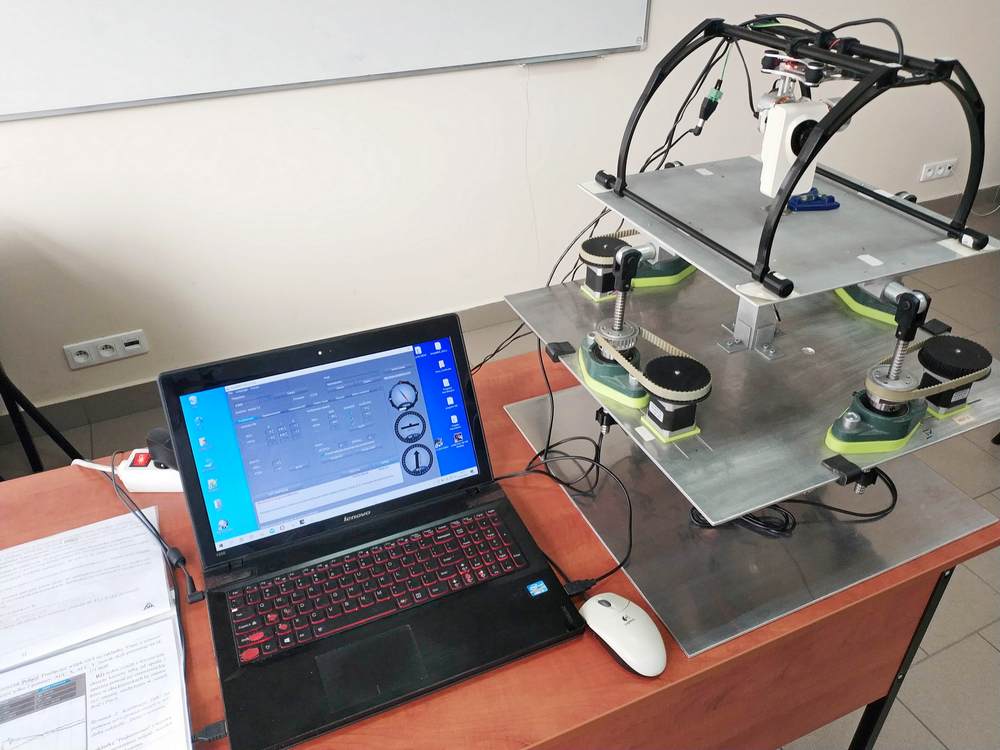
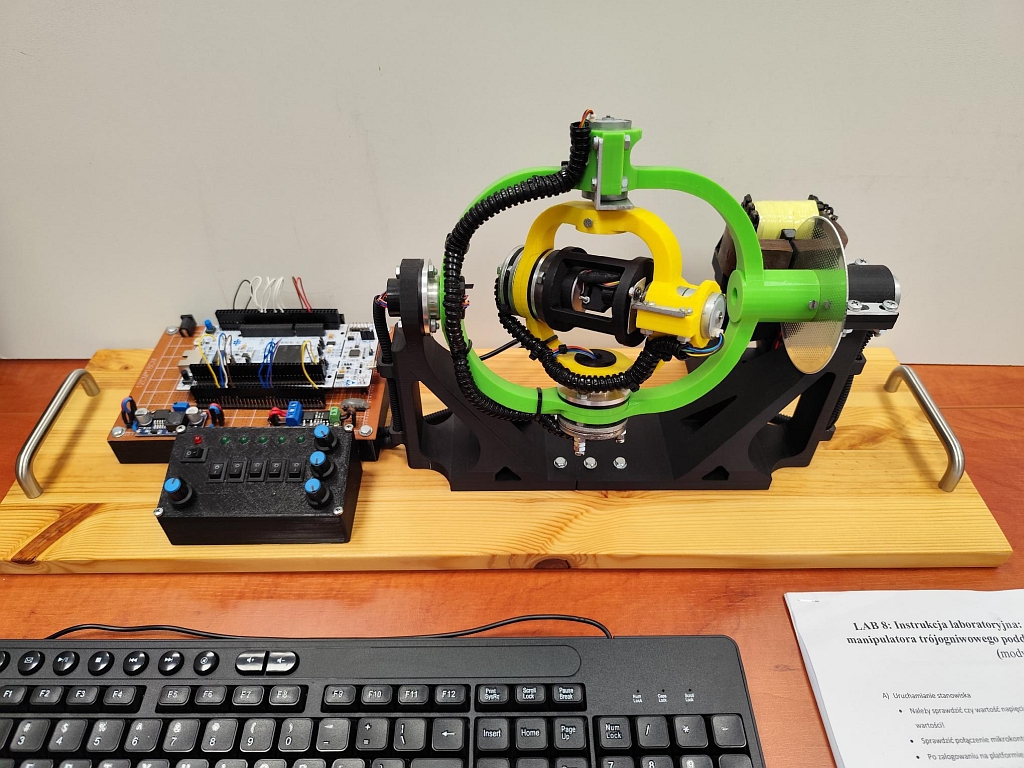
LAB 1A. Dobór parametrów regulatora PID w układzie dwuosiowej stabilizacji kamery zamocowanej do gimbala napędzanego silnikami BLDC. |
||
|
||
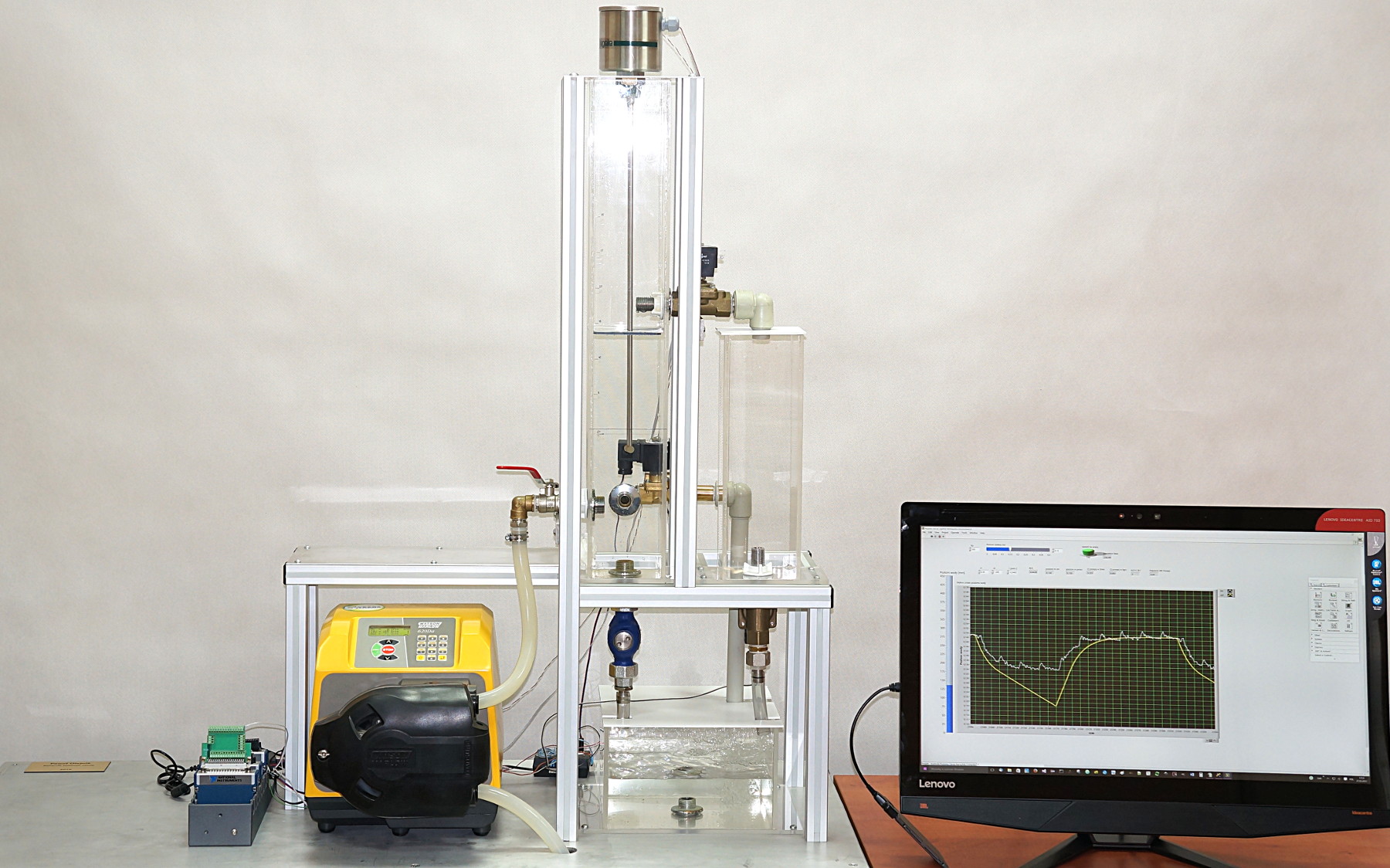
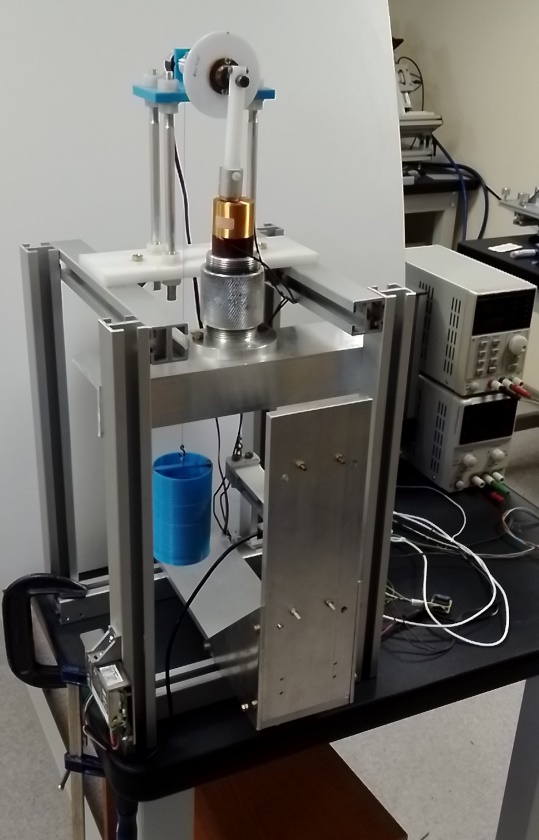
LAB 3. Regulacja poziomu cieczy w układzie dwóch połączonych zbiorników wypełnionych wodą |
||
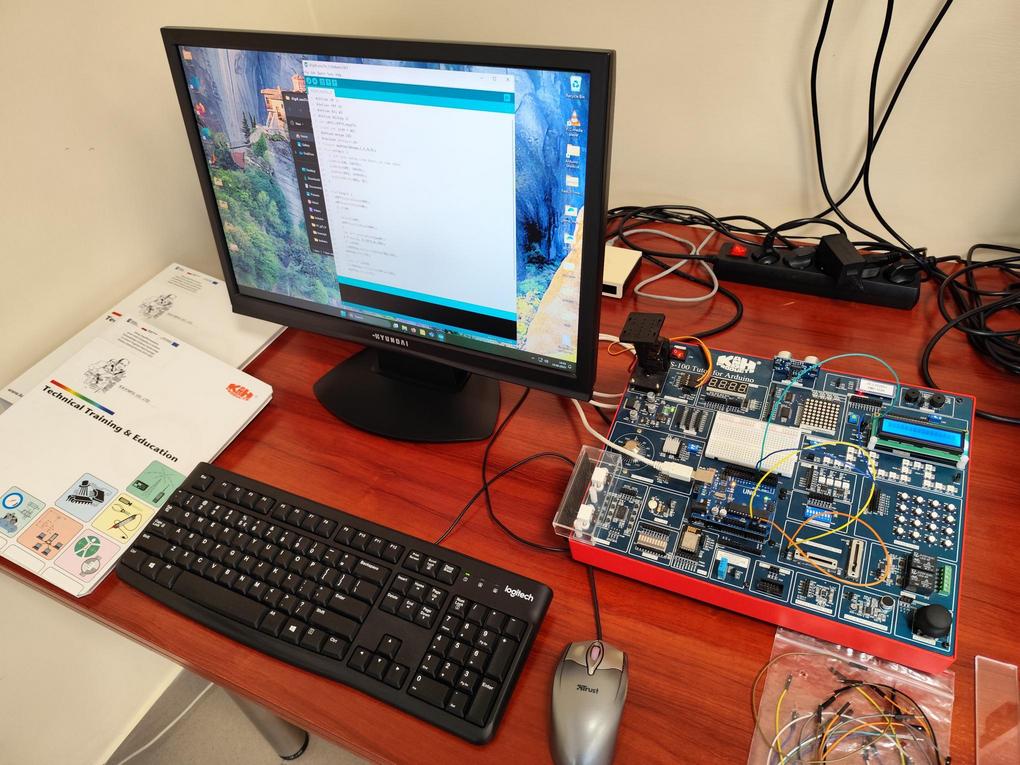
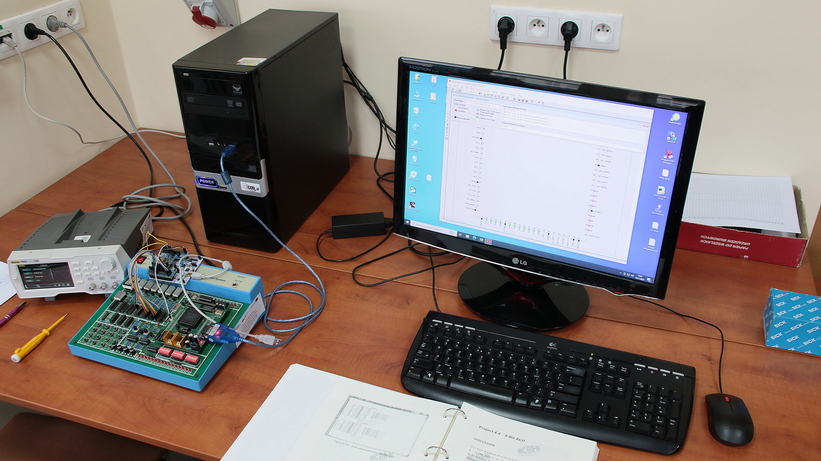
LAB 4. Sterowanie urządzeniami mechatronicznymi i przesyłanie danych na stanowisku do testowania mikrokontrolerów Arduino UNO |
||
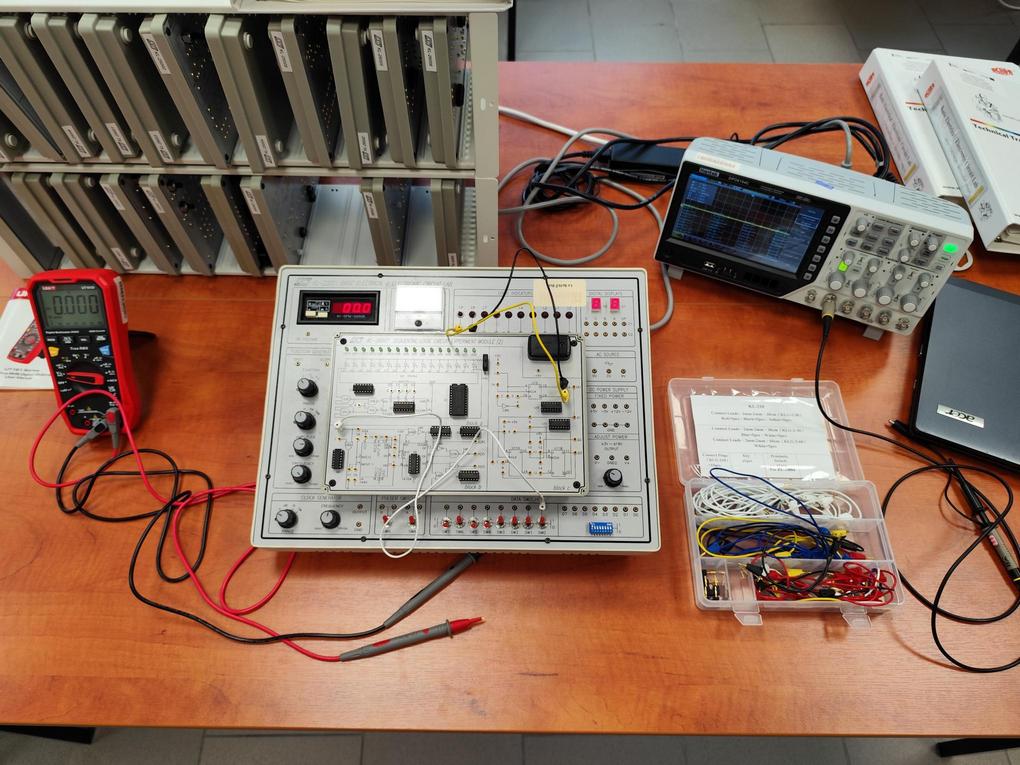
LAB 5. Projektowanie układów arytmetyczno-logicznych przy użyciu zestawu do badania układów cyfrowych CPLD/FPGA |
||
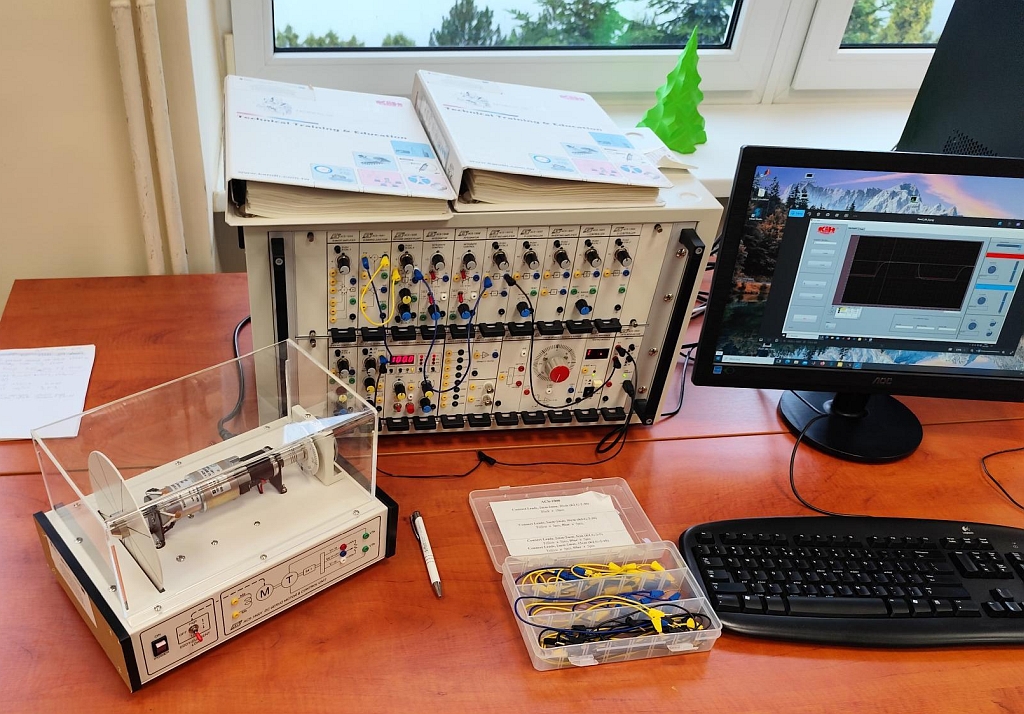
LAB 6. Systemy analogowego modelowania i sterowania liniowych układów dynamicznych |
||
LAB 7. Odpowiedzi statyczne i dynamiczne na stanowisku laboratoryjnym KL-210 do badania pod-stawowych układów elektrycznych/elektronicznych |
||
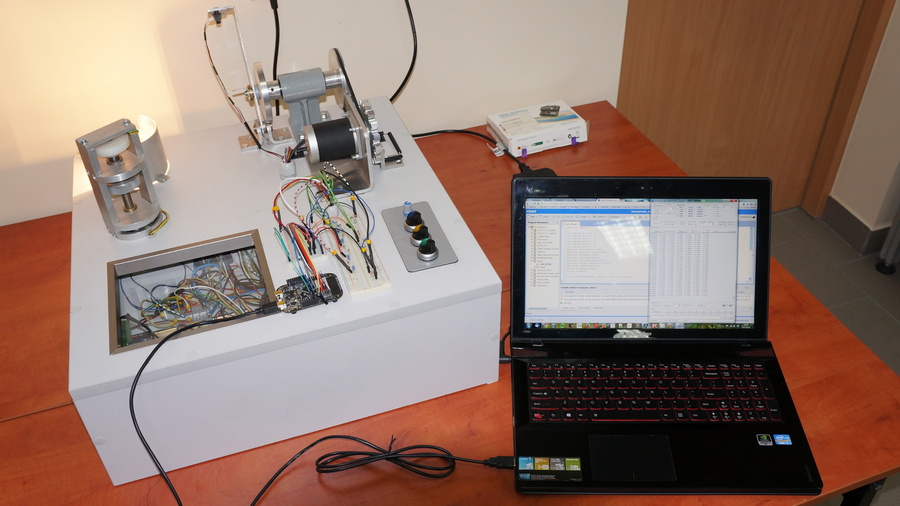
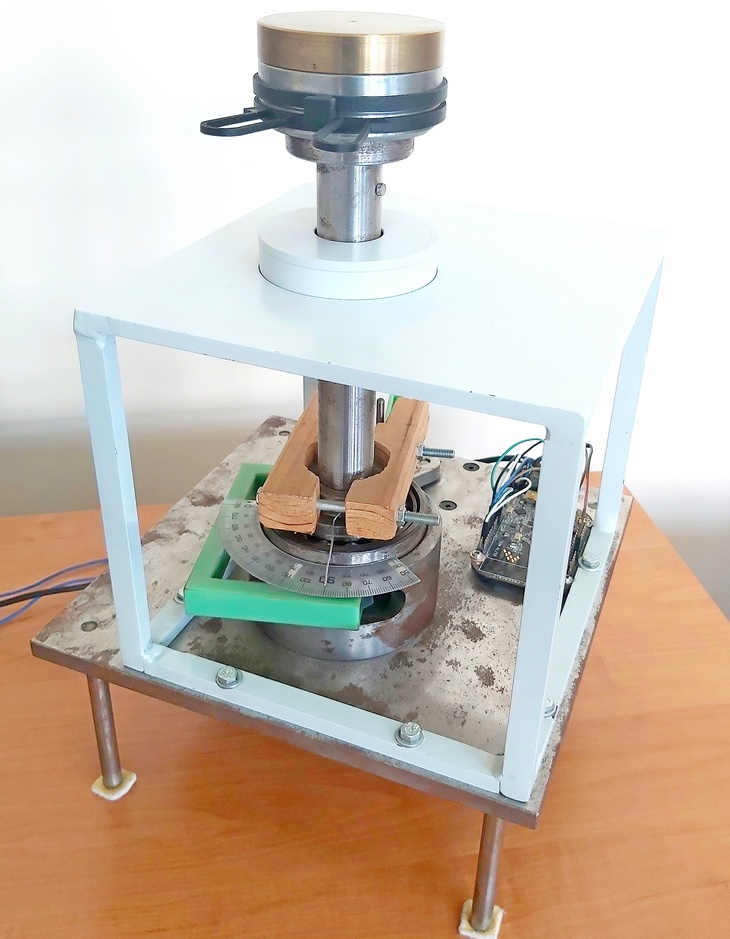
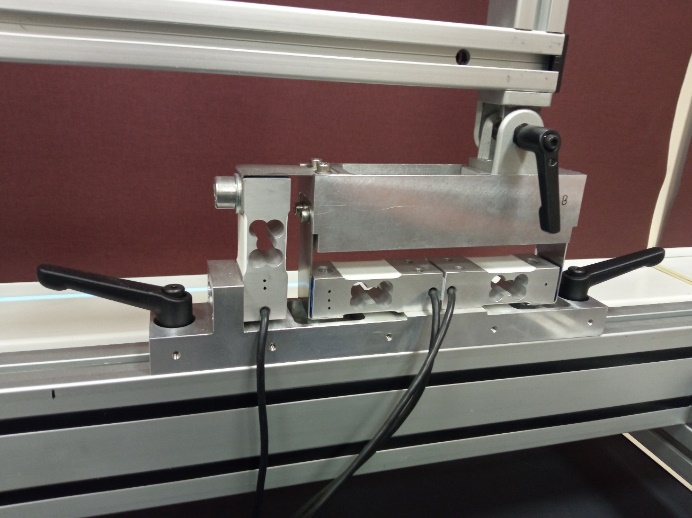
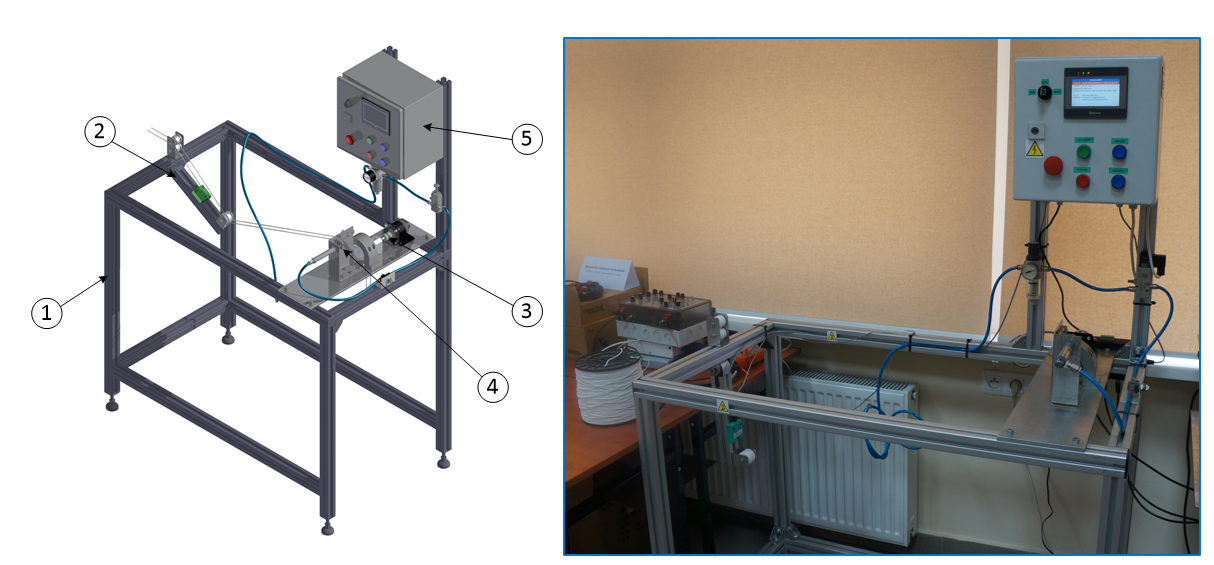
LAB 8. System mechatroniczny do obserwacji i badania tarcia ślizgowego (cz. A i B) |
||
LAB 9. Pomiary i przetwarzanie sygnałów elektrycznych w układach mechatronicznych |
||
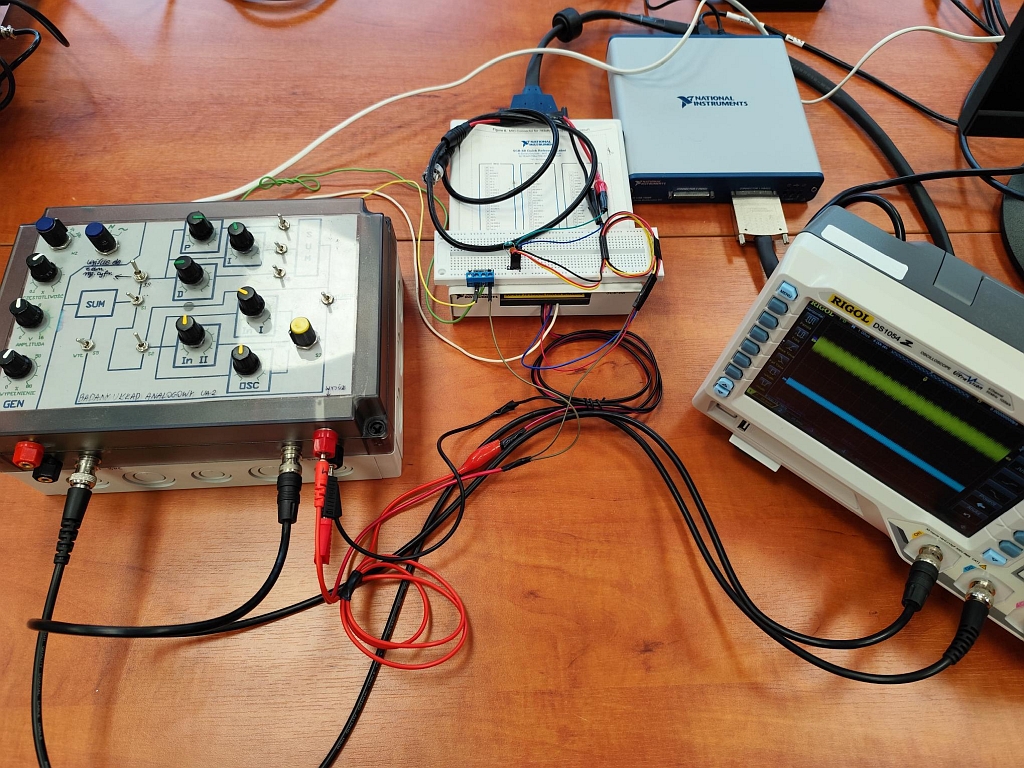
LAB 10. Analogowy układ regulacji automatycznej we współpracy z regulatorem cyfrowym |
||
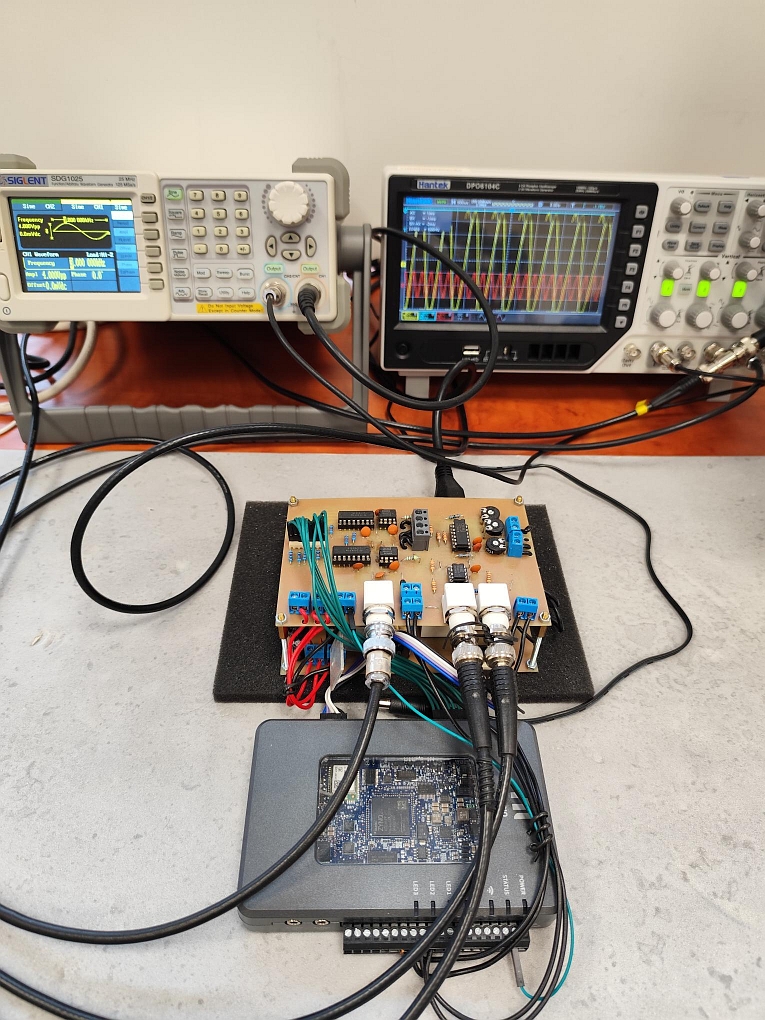
LAB 11. Wybrane układy elektroniczne filtrów sygnałów analogowych i cyfrowych w pomiarach i automatyce |
||
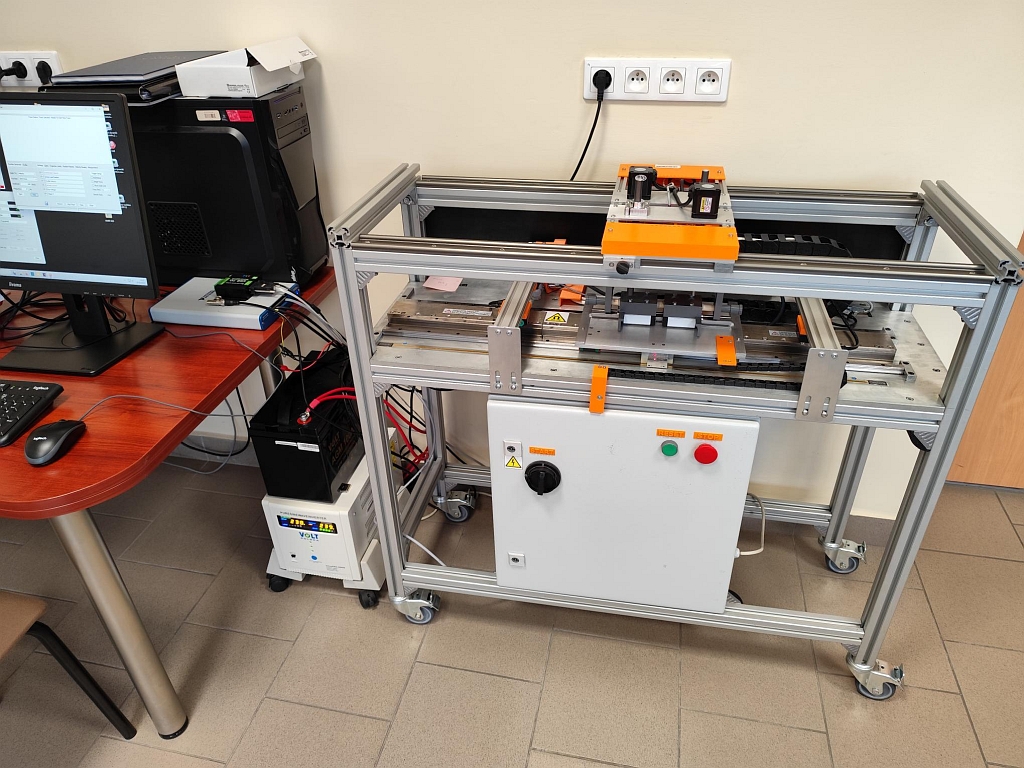
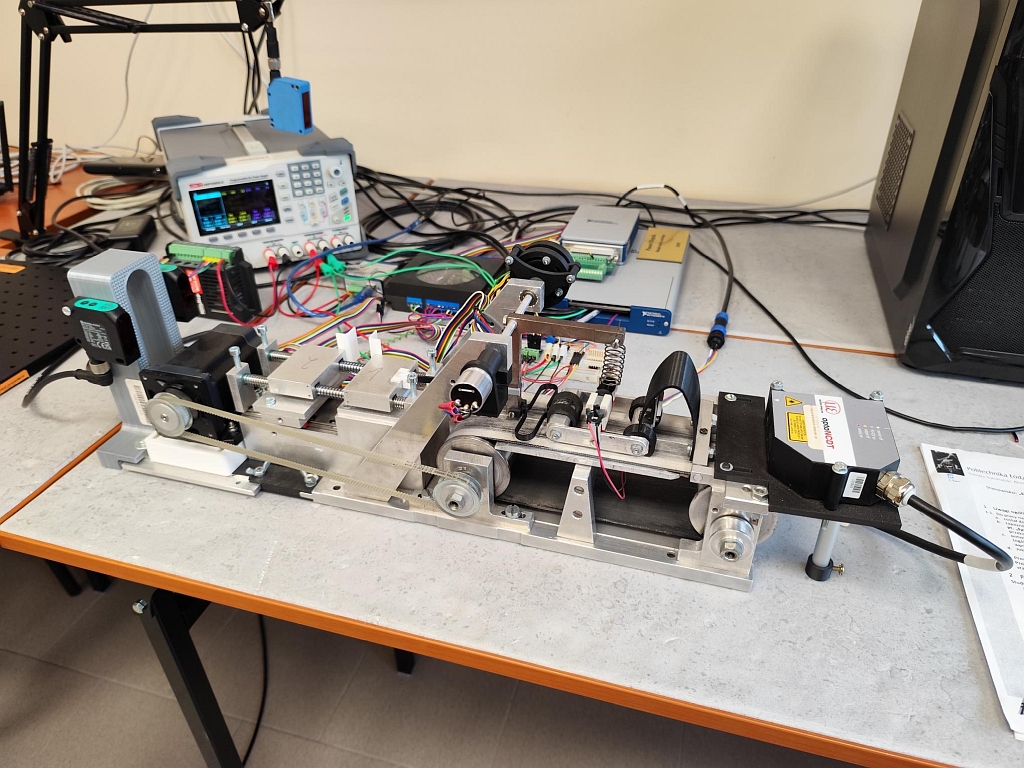
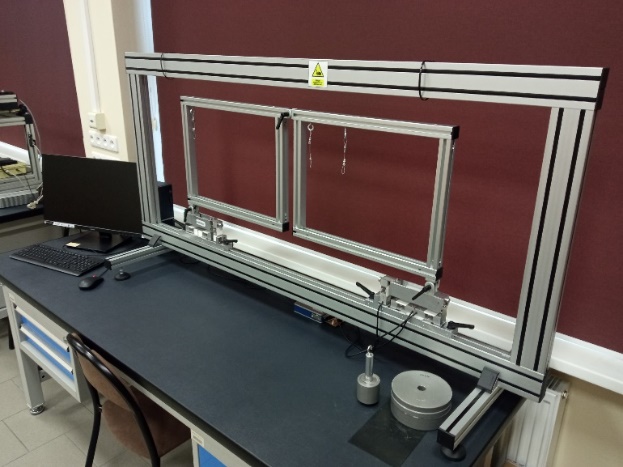
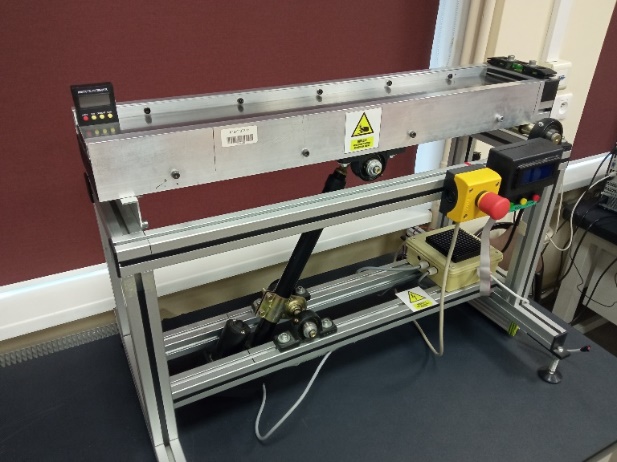
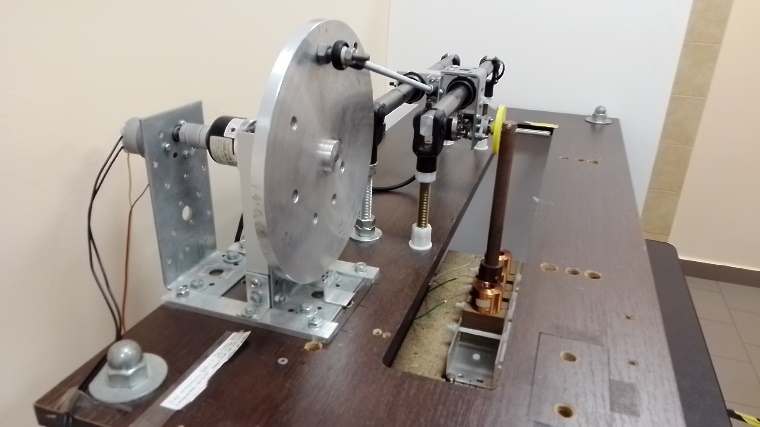
LAB 12. Dobór parametrów regulatora PID układu regulacji trajektorii położenia i prędkości liniowego silnika synchronicznego z magnesami trwałymi pod zmiennym obciążeniem ciernym |
||
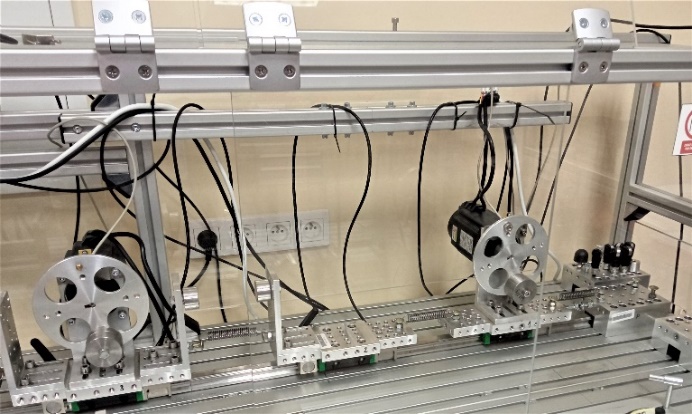
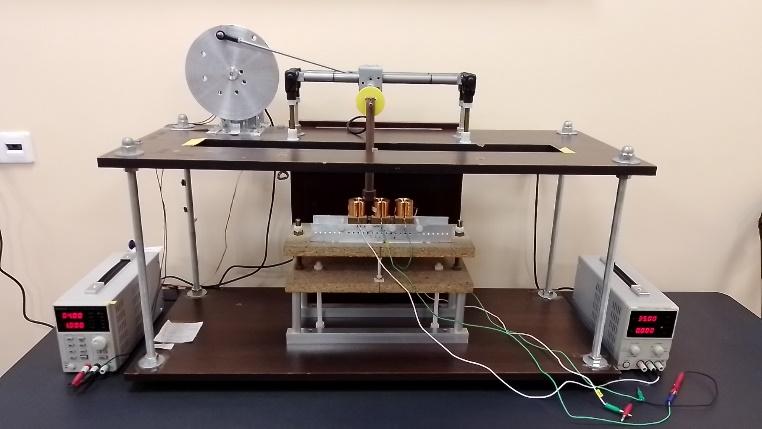
LAB 13. Rejestracja i analiza trajektorii czasowych drgań mechanicznych wahadła torsyjnego z tarciem w odpowiedzi na wymuszenie quasi-sinusoidalne |
W przygotowaniu | |

LAB 14. Sterowanie położeniem kamery osadzonej na dwuosiowym gimbalu zintegrowanym z ramieniem robotycznym |
W przygotowaniu | |
LAB 15. Sterowanie położeniem trójosiowego gimbala z luzami |
W przygotowaniu | |
0
Laboratorium mechatroniki II (2M323)

Opiekun: dr inż. G. Wasilewski
Stanowisko |
Materiały |
|
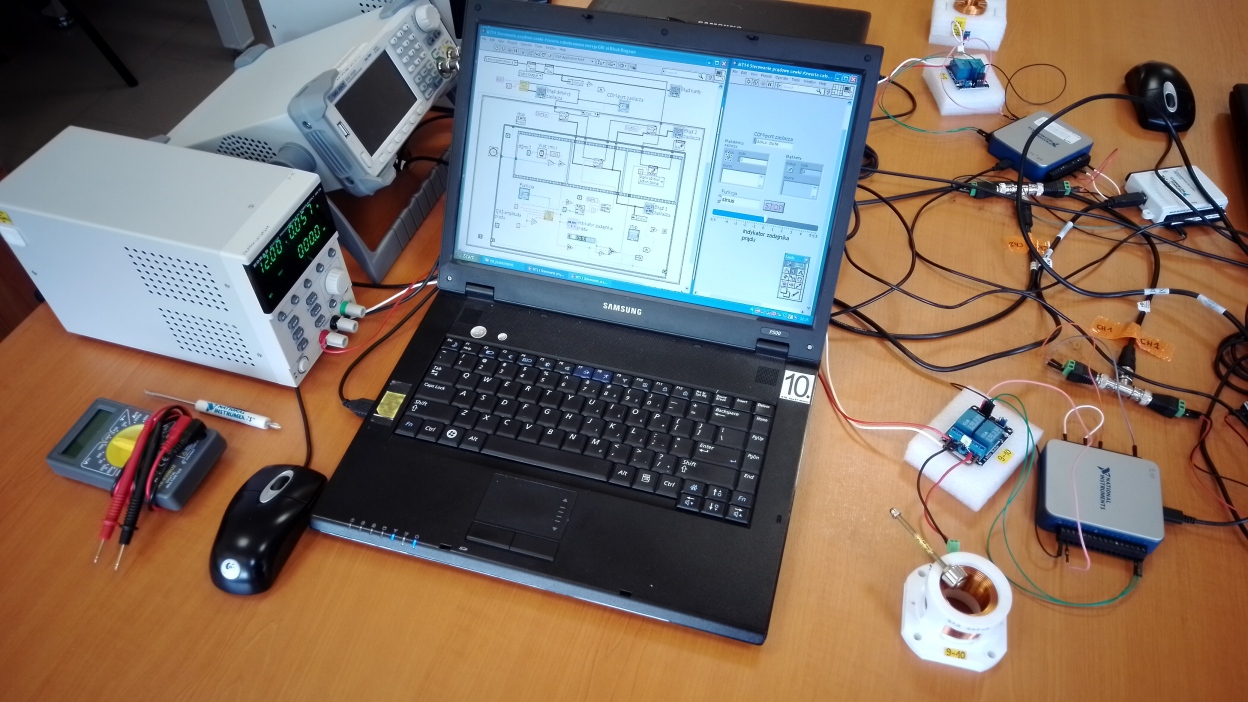
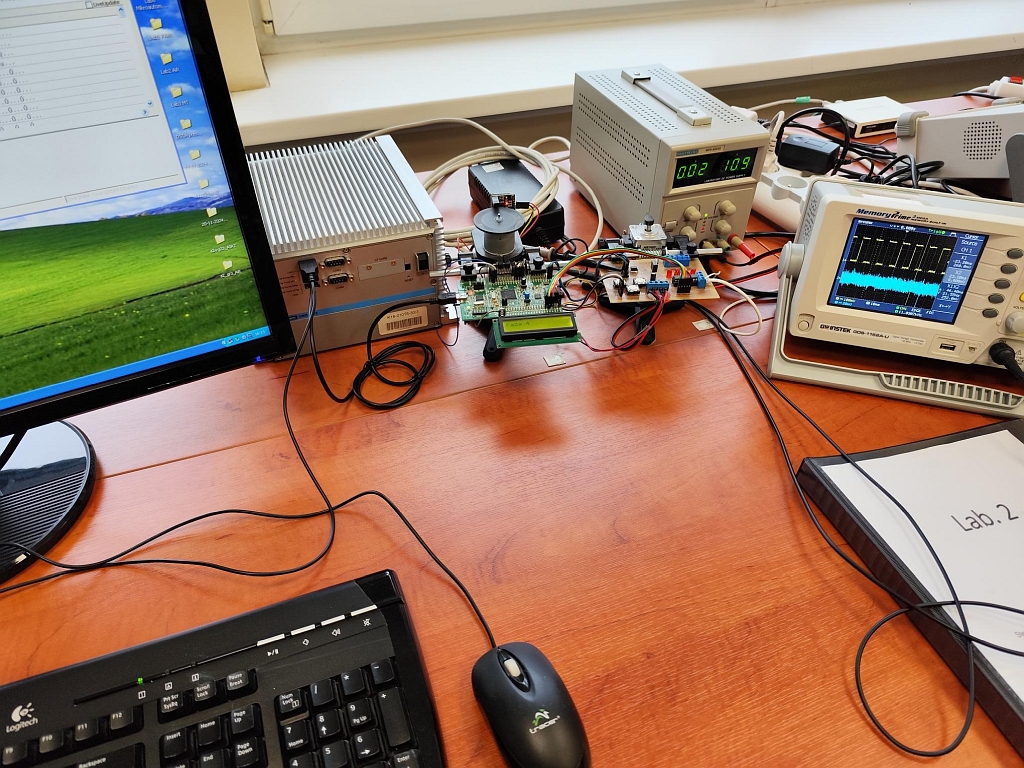
Pojedyncze stanowisko z komputerem, kartą pomiarową, sterowanym zasilaczem, |
|
|
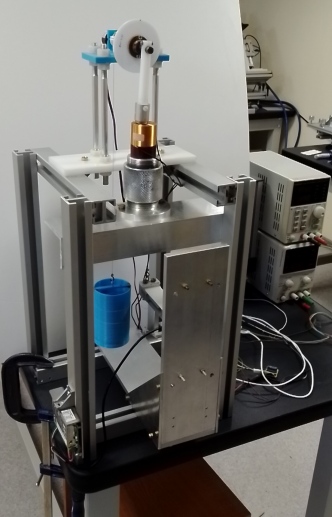
Wahadło fizyczne |
|
|
0
Laboratorium mechaniki (2M336)

Opiekun: dr inż. K. Witkowski
Stanowisko |
Materiały |
|||
| 1 |
Stanowisko do badania reakcji podporowych w statycznych układach płaskich |
|||
| 2 |
Automatyczna równia pochyła do badania współczynników tarcia suchego |
|||
| 3 |
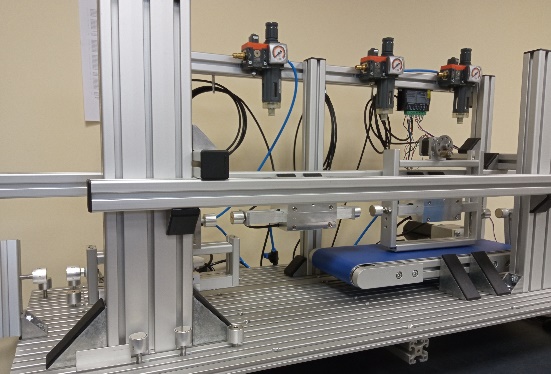
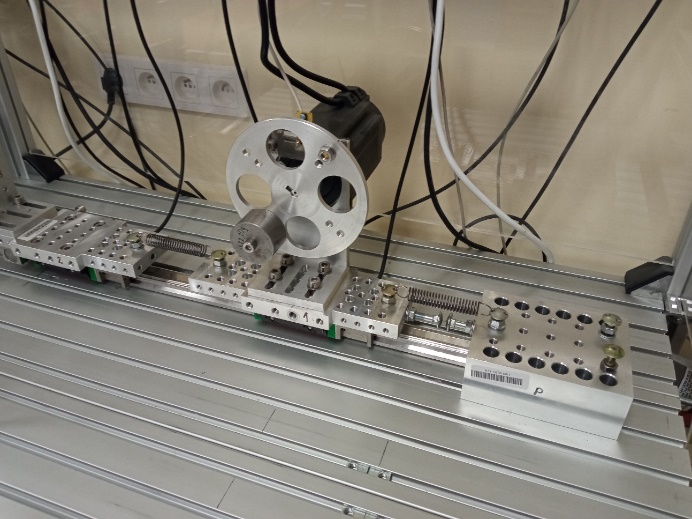
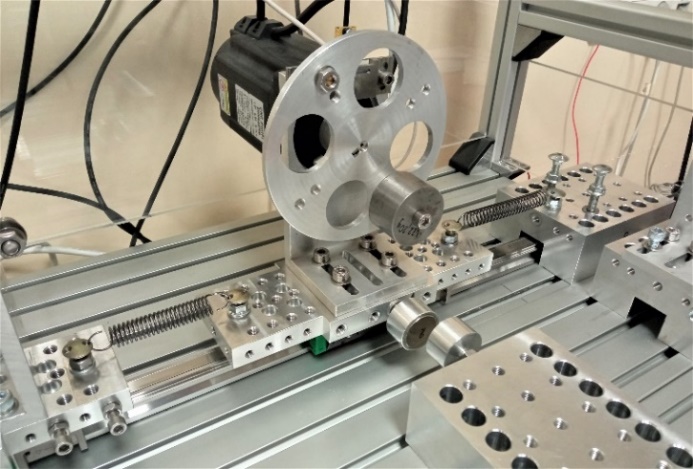
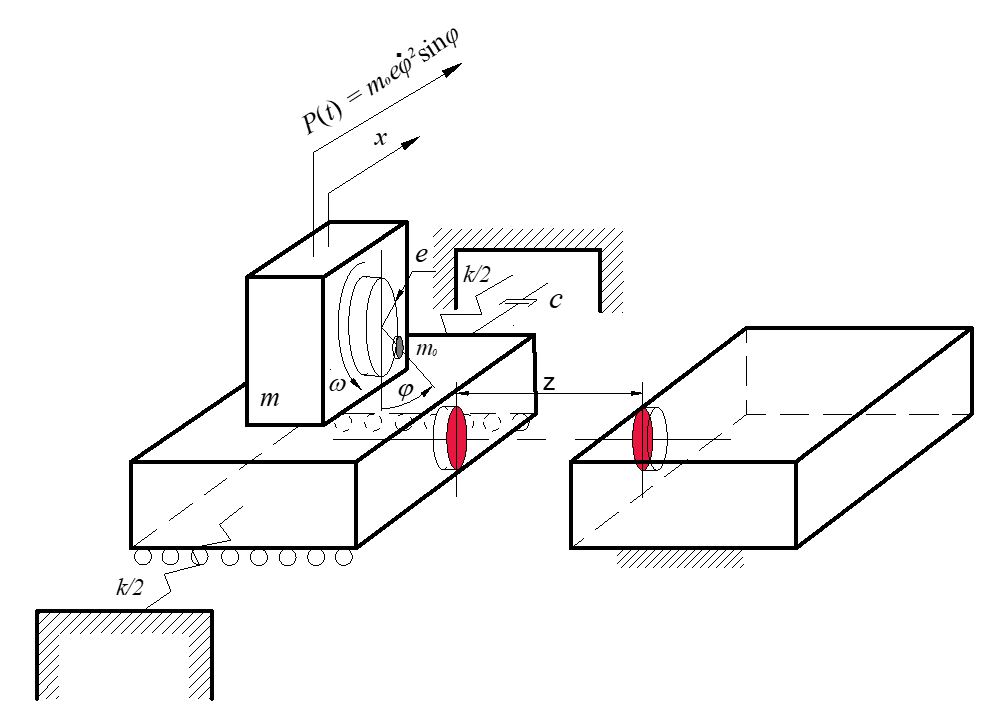
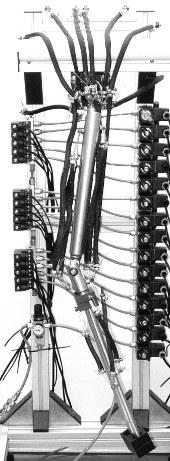
Uniwersalne rekonfigurowalne stanowisko do badania układów oscylatorów mechanicznych: o 1 i wielu stopniach swobody, wymuszonych siłowo i parametrycznie, z nieliniowymi sprężynami magnetycznymi i uderzeniami. |
|
||
| 3A |
|
|||
| 3B |
|
Publikacja 4 | ||
| 3C |
|
Publikacja | ||
| 3D |
|
Publikacja | ||
| 3E |
|
Publikacja | ||
| 4 |
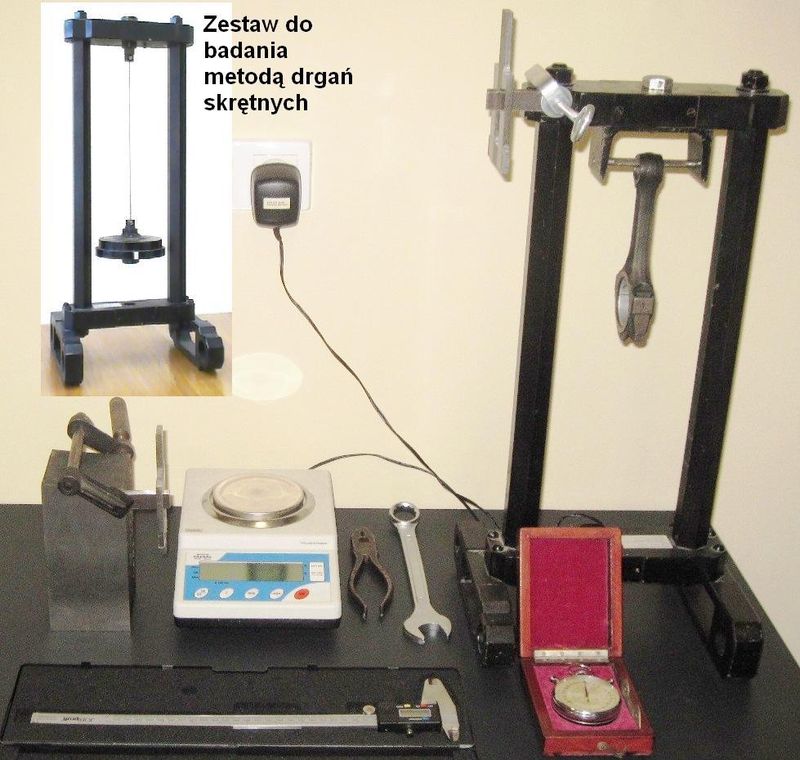
A. Badanie momentów bezwładności metodą wahadła |
|||
| 5 |
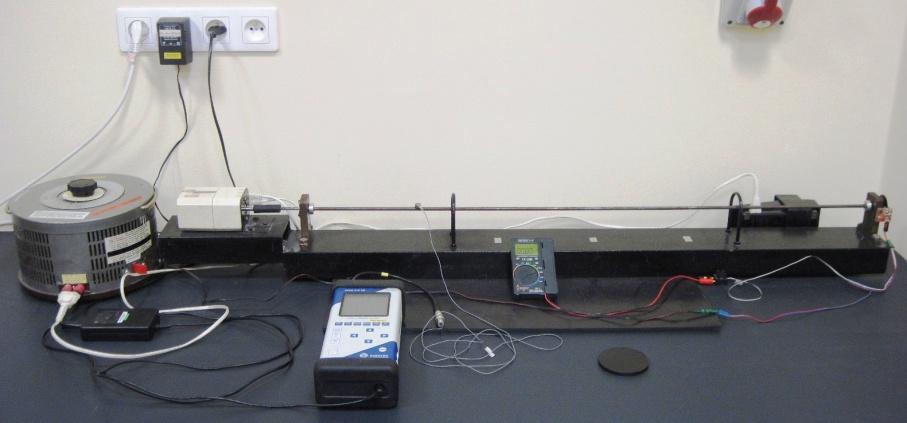
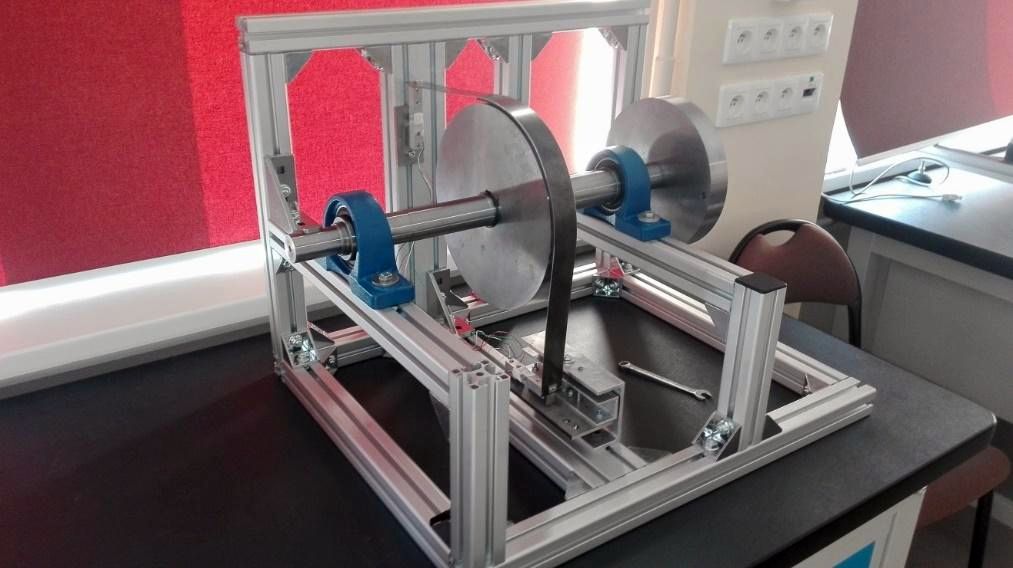
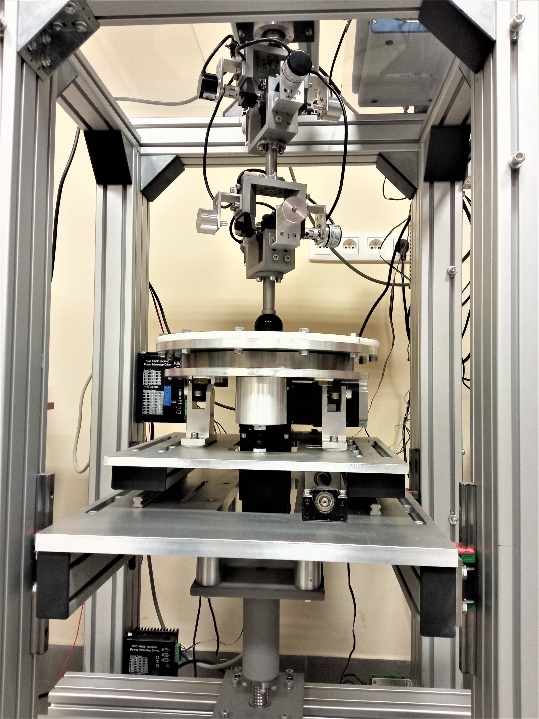
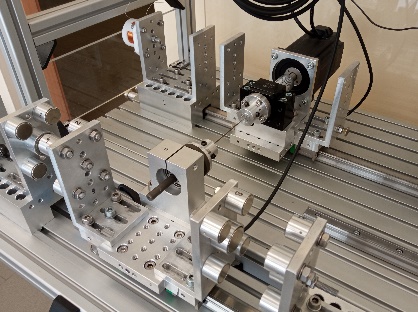
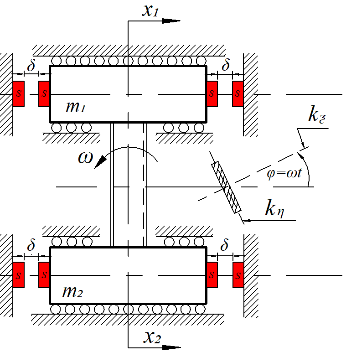
A. Badanie trzech prędkości krytycznych |
Sprawozdanie | ||
| 6 |
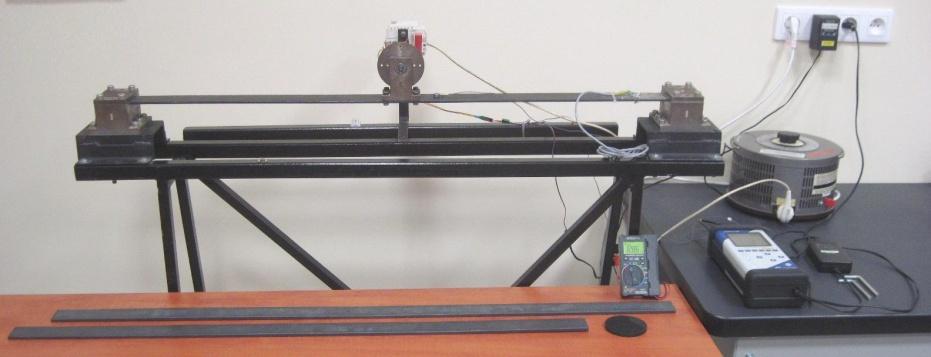
A. Badanie drgań własnych i wymuszonych belki |
Sprawozdanie | ||
| 7 |

Badanie drgań swobodnych |
Sprawozdanie | ||
| 8 |
Badanie zależności pomiędzy siłami w cięgnach hamulca w równowadze granicznej |
Sprawozdanie | ||
| 9 |
Podwójne wahadło przestrzenne z przegubami Cardana-Hooka do badań: |
Publikacja | ||
| 10 |
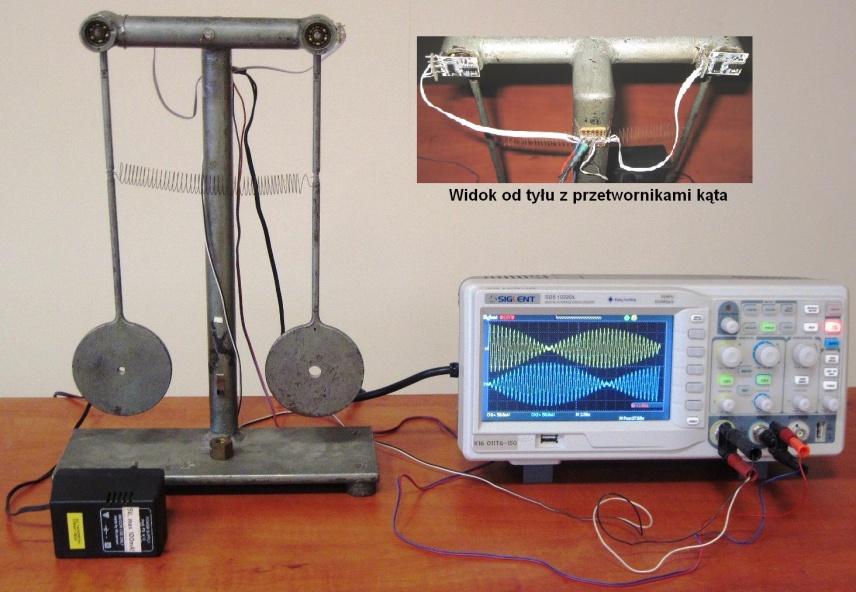
A. Badanie i rejestracja postaci drgań układu połączone z obserwacją zjawiska przekazywania energii |
Sprawozdanie | ||
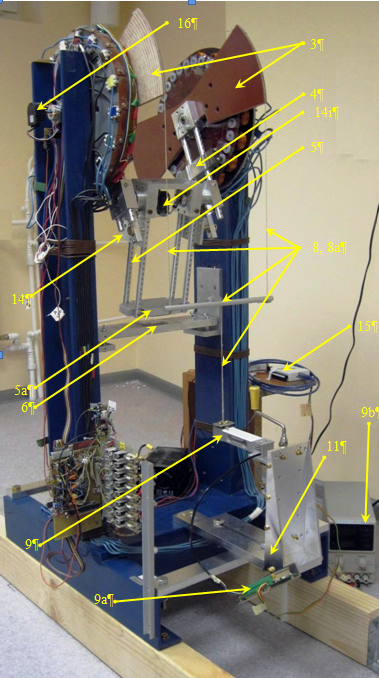
| 11 |
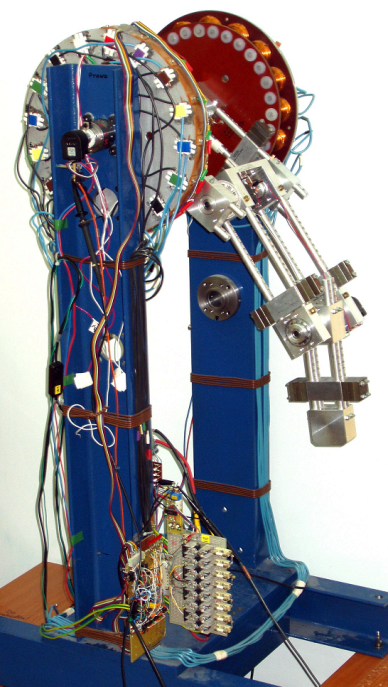
A. Badanie dynamiki bifurkacyjnej potrójnego wahadła fizycznego |
|||
| 12 |
Badanie momentu magnetycznego w funkcji kąta względnego ogniw |
|||
| 13 |
A. Badanie dynamiki bifurkacyjnej wahadła wymuszonego poziomo silnikiem prądu stałego za pośrednictwem mechanizmu korbowo-wodzikowego, z możliwością wprowadzenia oddziaływań magnetycznych |
|||
| 14 |
A. Badanie postaci ruchu wahadła dla różnych prądów, częstotliwości i wypełnienia sygnału załączania |
|||
| 15 |

A. Badanie postaci ruchu wahadła dla różnych opcji: a) wahadła badane jako pojedyncze lub połączone podatnie, b) pomiary dla różnych prądów, częstotliwości, wypełnienia sygnału załączania |
Publikacja | ||
| 16 |
Ćwiczenie 1: „Badanie ruchu swobodnego wahadła fizycznego łożyskowanego aerostatycznie.” |
|||
| 17 |

A. Badanie rezonansu parametrycznego pojedynczego wahadła |
|||
| 18 |
Samowzbudny układ drgający z wymuszeniem bezwładnościowym, wykorzystujący łożyska aerostatyczne pozwalający na badanie dynamiki układu o jednym, dwóch lub trzech stopniach swobody odpowiednio z: |



0
Laboratorium automatyki (2M331)

Opiekun: dr inż. K. Polczyński
Stanowisko |
Materiały |
|
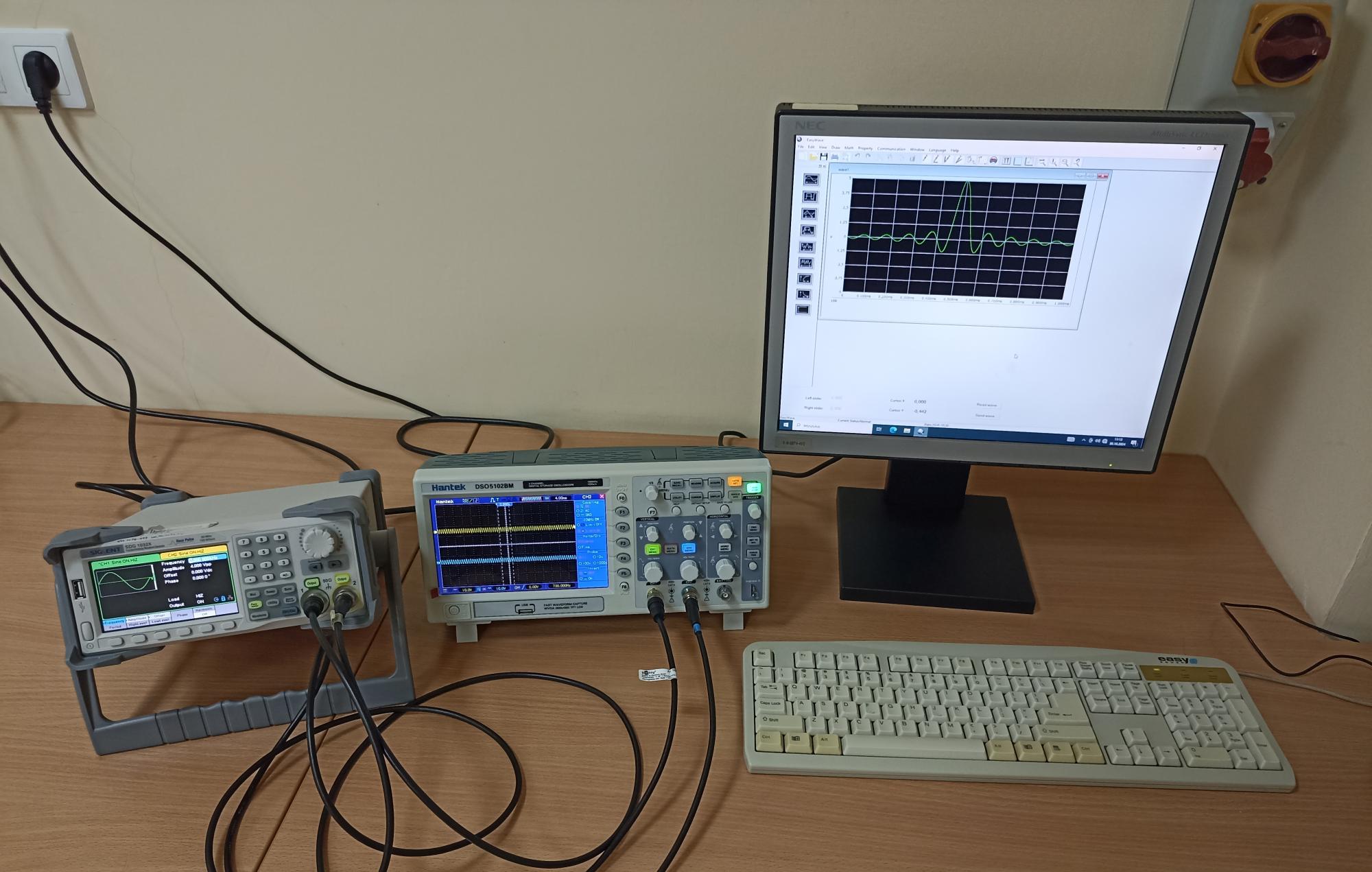
1. Obsługa oscyloskopu i generatora sygnałów |
||

2. Badanie podstawowych członów automatyki |
||

3. Badanie układ regulacji ciągłej |
||

4. Badanie układ regulacji nieciągłej |
||

5. Badanie układu nadążnego |
||
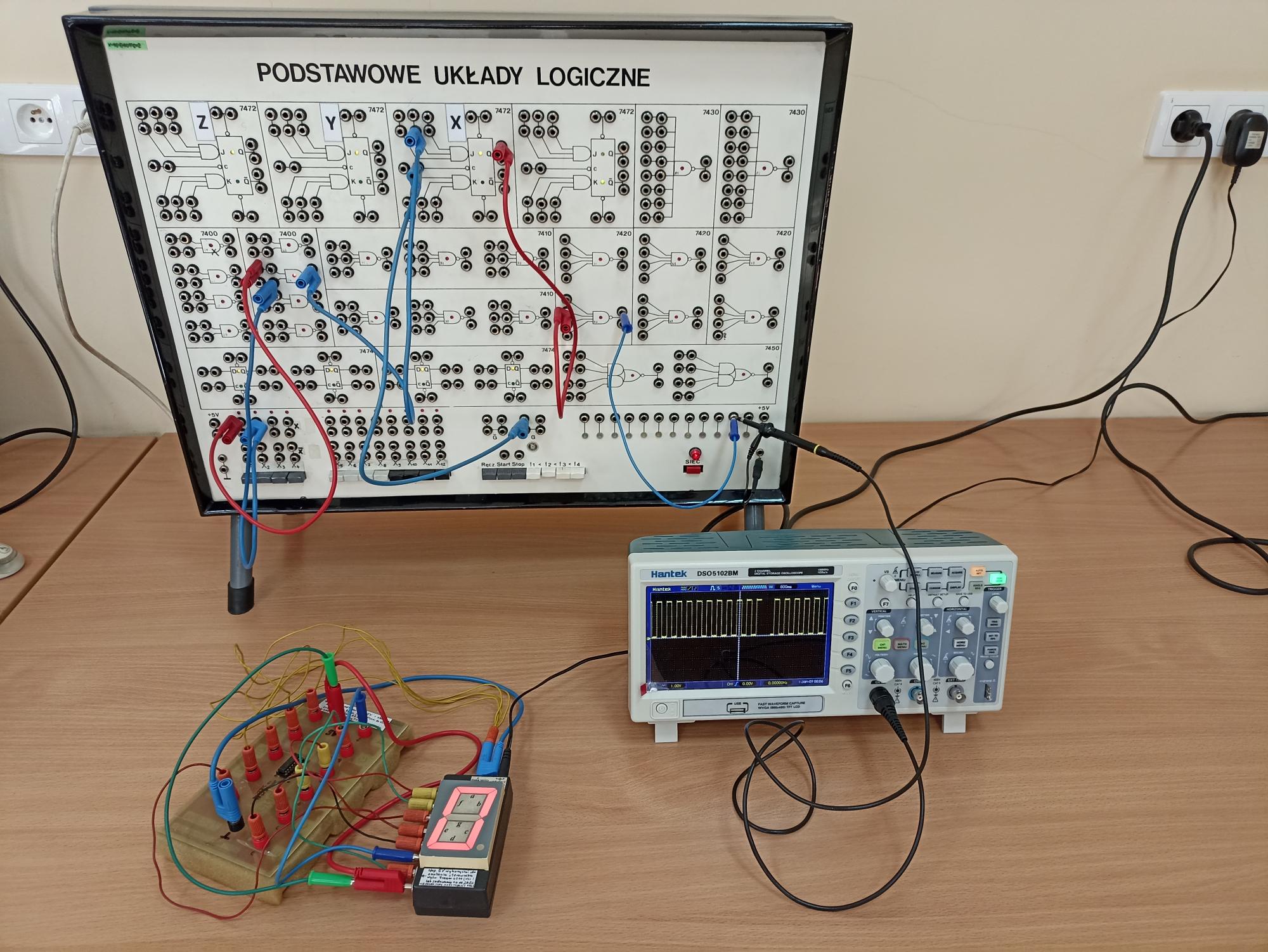
6. Badanie kombinacyjnych i sekwencyjnych układów logicznych |
||
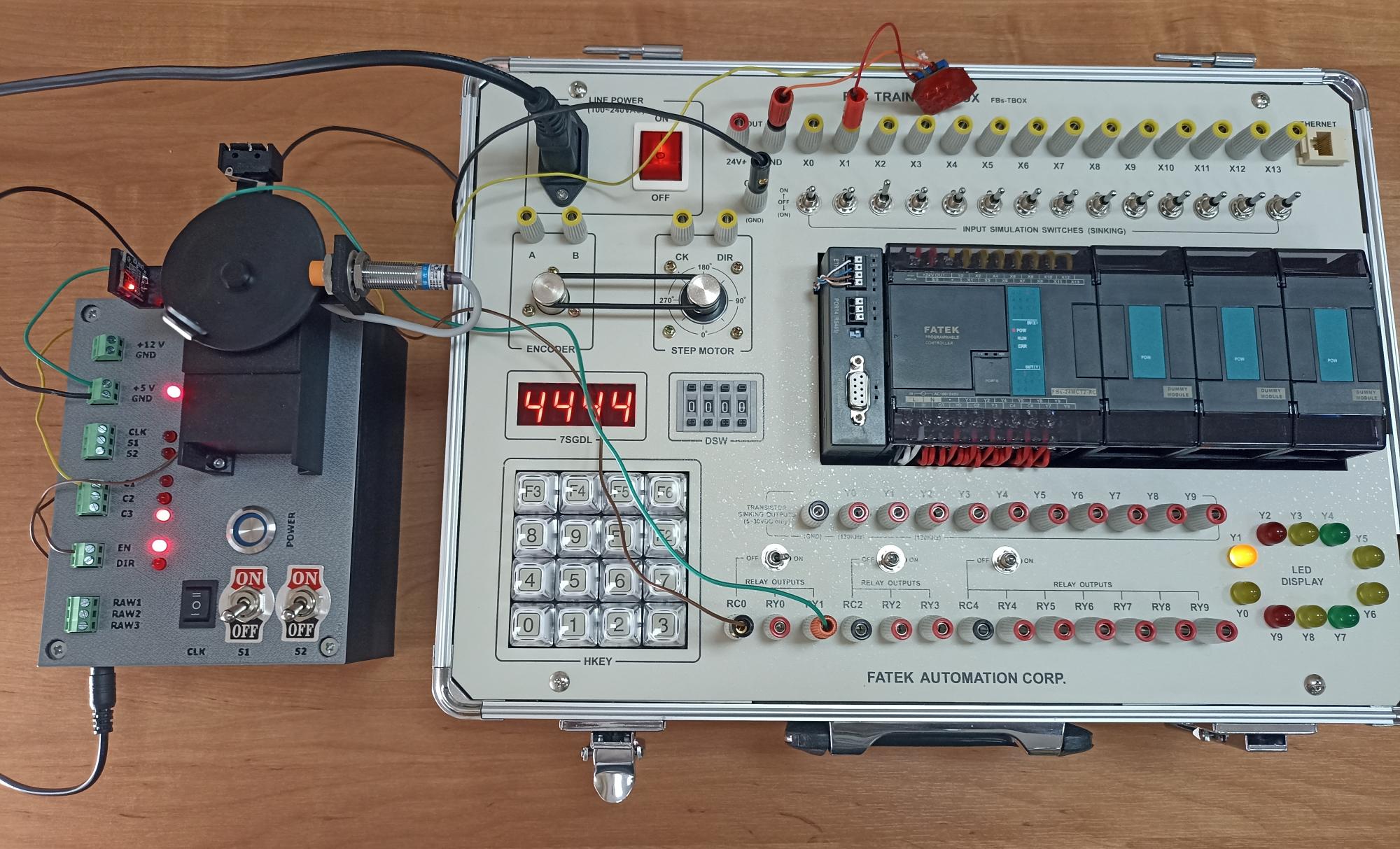
7. Badanie automatu Moore'a |
||
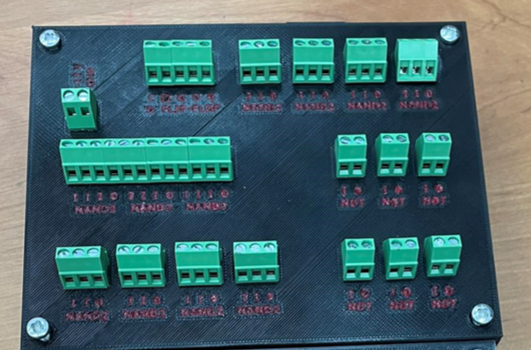
8. Badanie hazardu statycznego w układach kombinacyjnych i sekwencyjnych |
||

9. Opracowanie sterowania podajników taśmowych przy użyciu sterownika PLC |
||

10. Projektowanie wizualizacji systemu transportującego przy użyciu panelu operatorskiego HMI firmy Weintek w środowisku EasyBuilder 8000 |
||
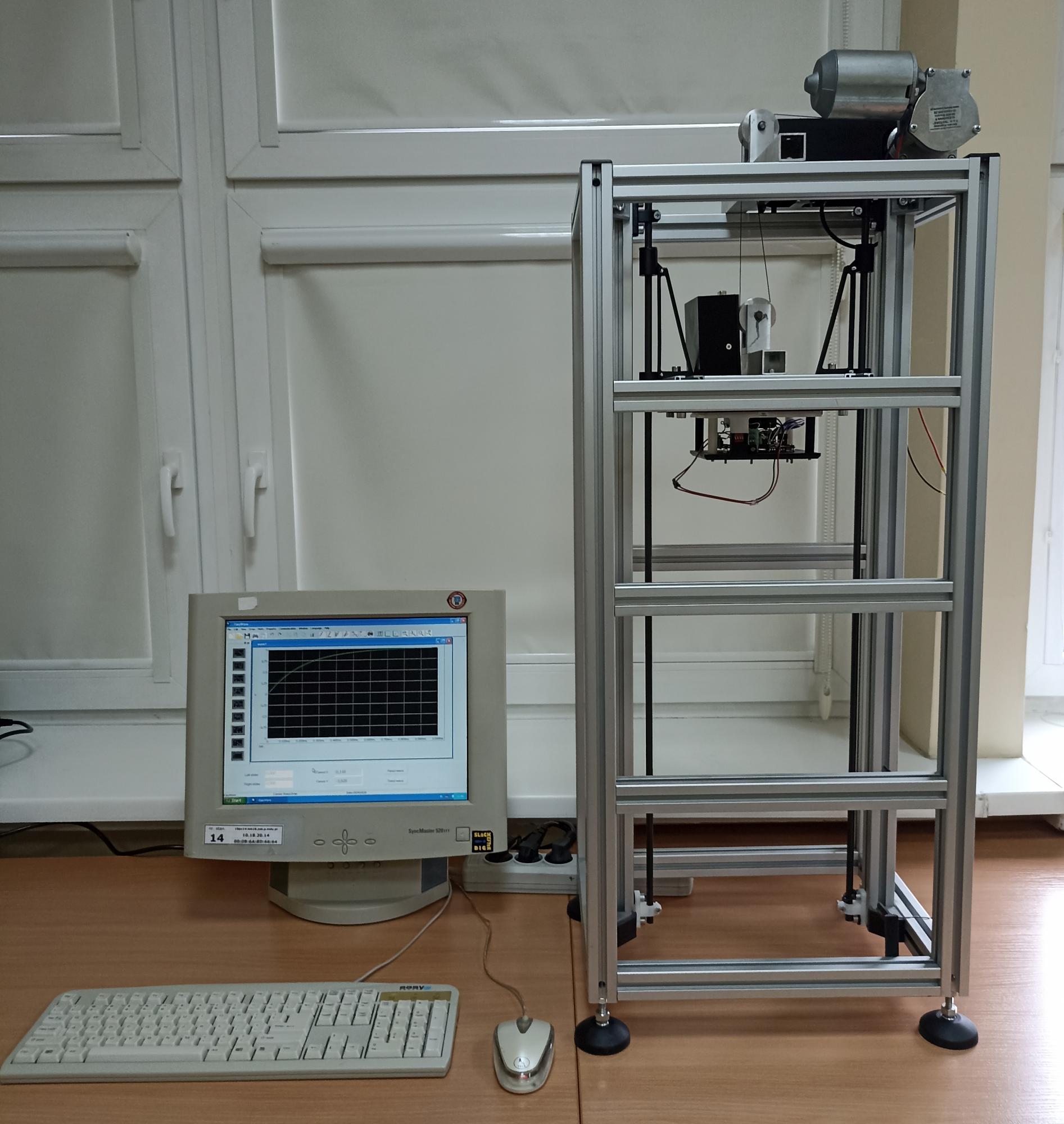
11. Badanie sterowania i dynamiki modelu windy |
||
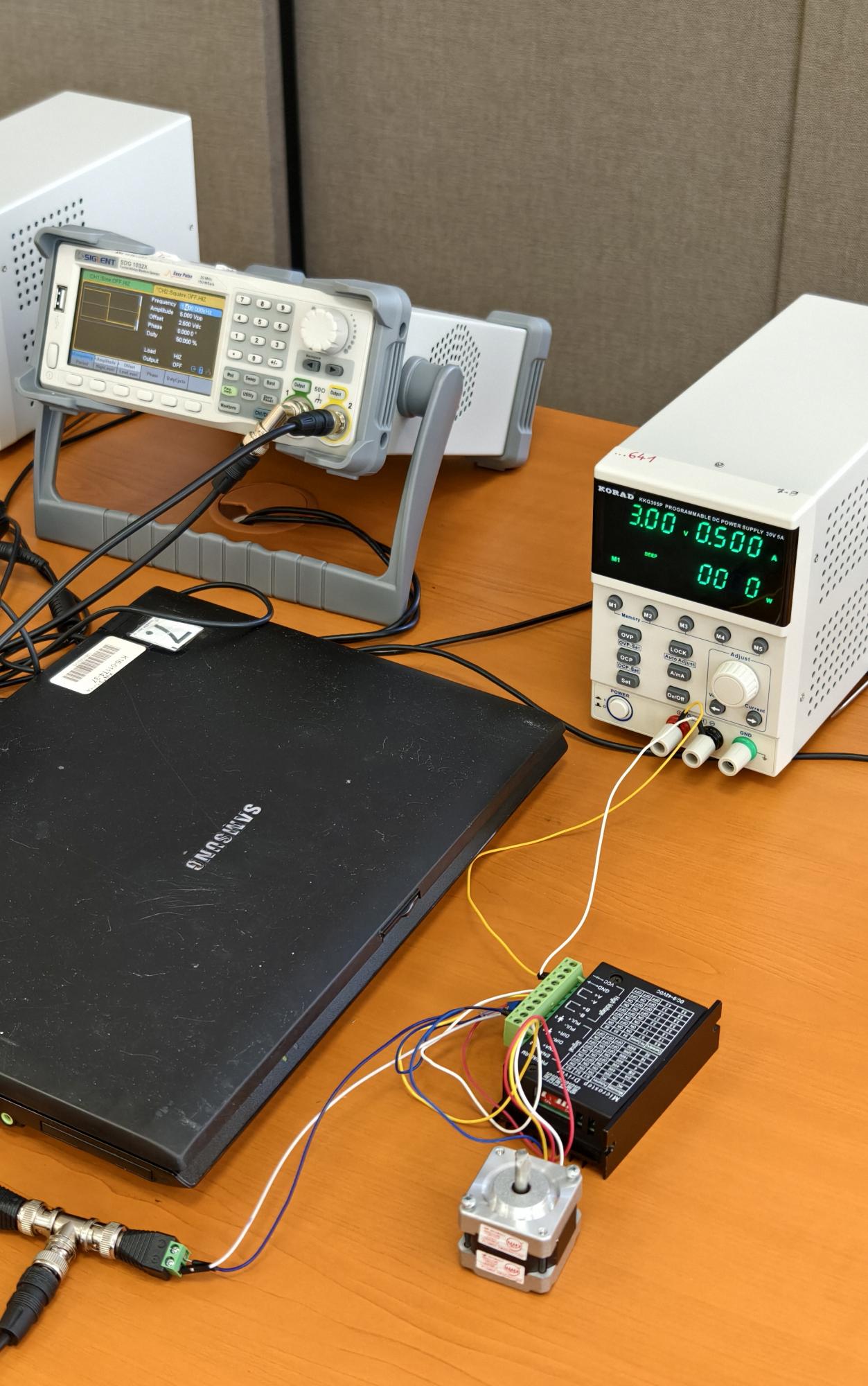
12. Sterowanie silnikami krokowymi |
||
13. Analiza systemu mechatronicznego do cięcia cięgna |
||
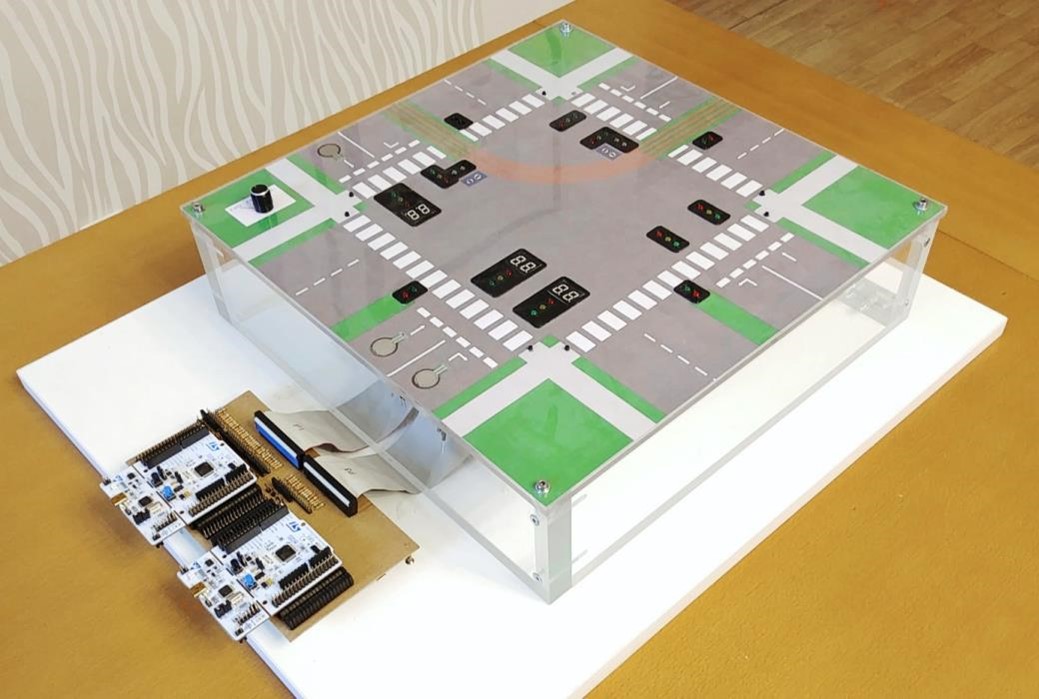
14. Sterowanie sygnalizacja świetlną |
|
|

15. Kompensacja nieidealności transmisji przekładni pasowej w układzie z silnikiem krokowym i enkoderem |
|
|
0
Laboratorium biomechaniki (2M337)

Opiekun: dr B. Zagrodny
Stanowisko |
Materiały |
|

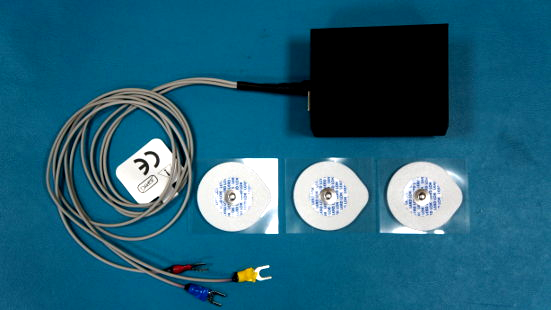
EKG serca, rejestracja sygnały elektrycznych pochodzących z ciała człowieka |
||

Przewodnictwo powietrzne i kostne, audiometria mowy |
||

Resuscytacja krążeniowo-oddechowa RKO |
|
|

Pomiar i diagnostyka żylnego i tętniczego ciśnienia krwi |
||
Osłuchiwanie płuc I i II tonu serca, badanie tętna, szumy płucne |
||

Kamera termowizyjna |
||

Reakcje podłoża w trakcie chodu, biegu, analiza stabilności postawy R |
||
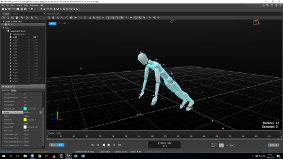
Optoelektroniczny system analizy i rejestracji ruchu |
||
Sterowanie w układzie pneumatycznym, elektrozawory, układ sterowania |
||

Badanie charakterystyk mięśni pneumatycznych (pierzastych) |
||
Elektromiografia powierzchniowa: Funkcjonowanie układu mięśniowego, współpraca mięśni jedno- i wielostawowych, kompensacja i stabilizacja ruchu |
||

Wyznaczanie środka ciężkości ciała człowieka |
||

Zastosowanie algorytmu ruchy wijącego się węża |
||
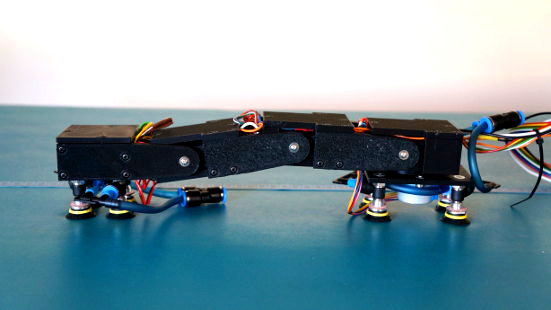
Badanie mechanizmu kroczącego po różnych podłożach |
||

Programowanie chodu |
||

Badanie zakresu ruchu kończyn i przestrzeni roboczej metodą SFTR |
||

Spirometr |
||

Badanie wytrzymałości oczodołu czaszki |
||
0
Laboratorium informatyki (2M135)

Opiekun: dr inż. M. Ludwicki
0
Laboratorium hexapoda (2M323)

Opiekunowie: prof. dr hab. inż. P. Olejnik
dr inż. G. Wasilewski
0
Pracownia projektów studenckich (2M133)

Opiekunowie: dr inż. A. Wijata
mgr. inż. M. Kaźmierczak
0
Warsztat mechaniczny (2M131)

Opiekunowie: dr inż. A. Wijata
mgr. inż. M. Kaźmierczak
0
Warsztat elektryczny (2M132)

Opiekunowie: dr inż. A. Wijata
mgr inż. M. Kaźmierczak
0
Sala konferencyjna (2M334)

Opiekun: dr M. Bednarek
0