Laboratory of Mechatronics I (2M339)

Supervisor: P. Olejnik
Station |
Materials |
|
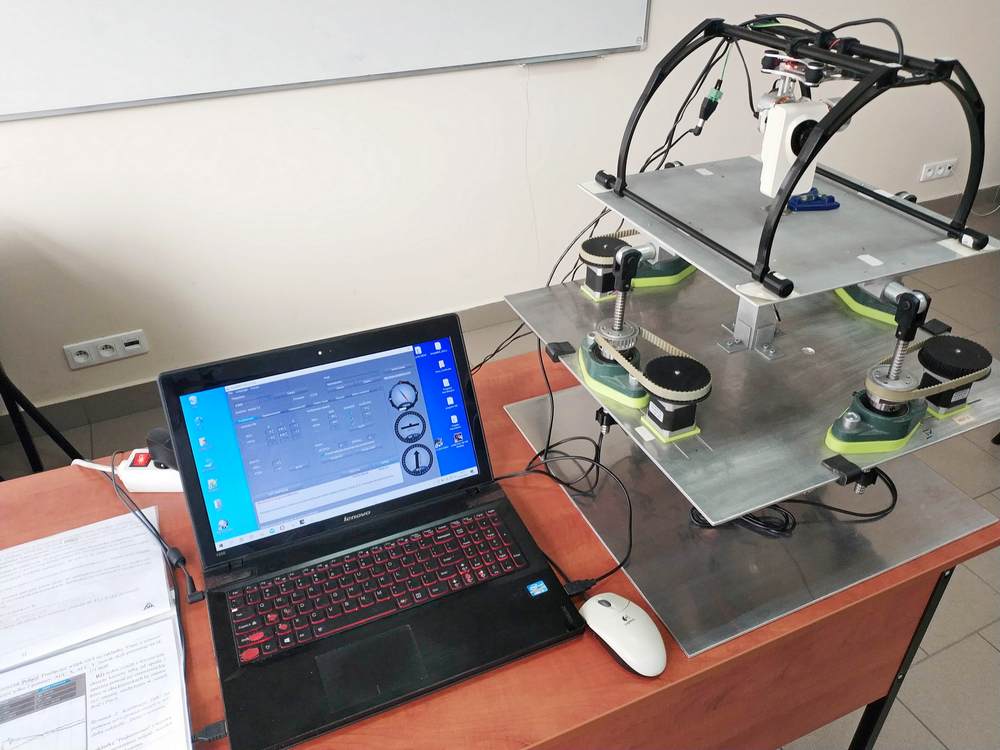
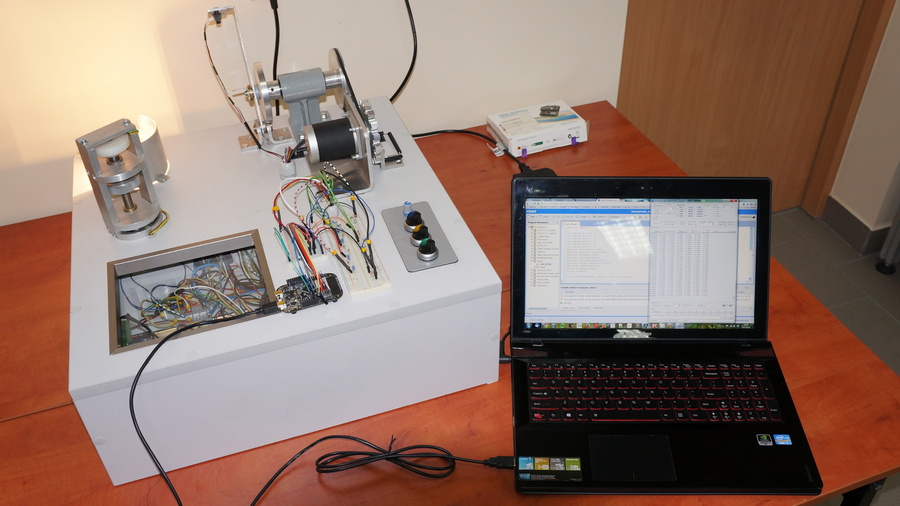
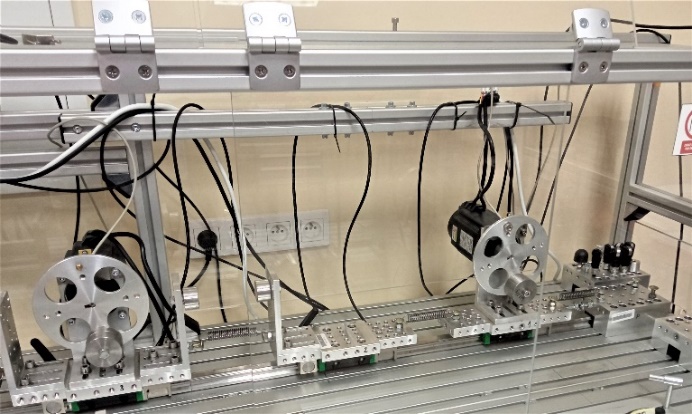
LAB 1A. Selection of parameters of the PID controller in the system of two-axis stabilization of a camera attached to a gimbal driven by BLDC motors |
||
|
||
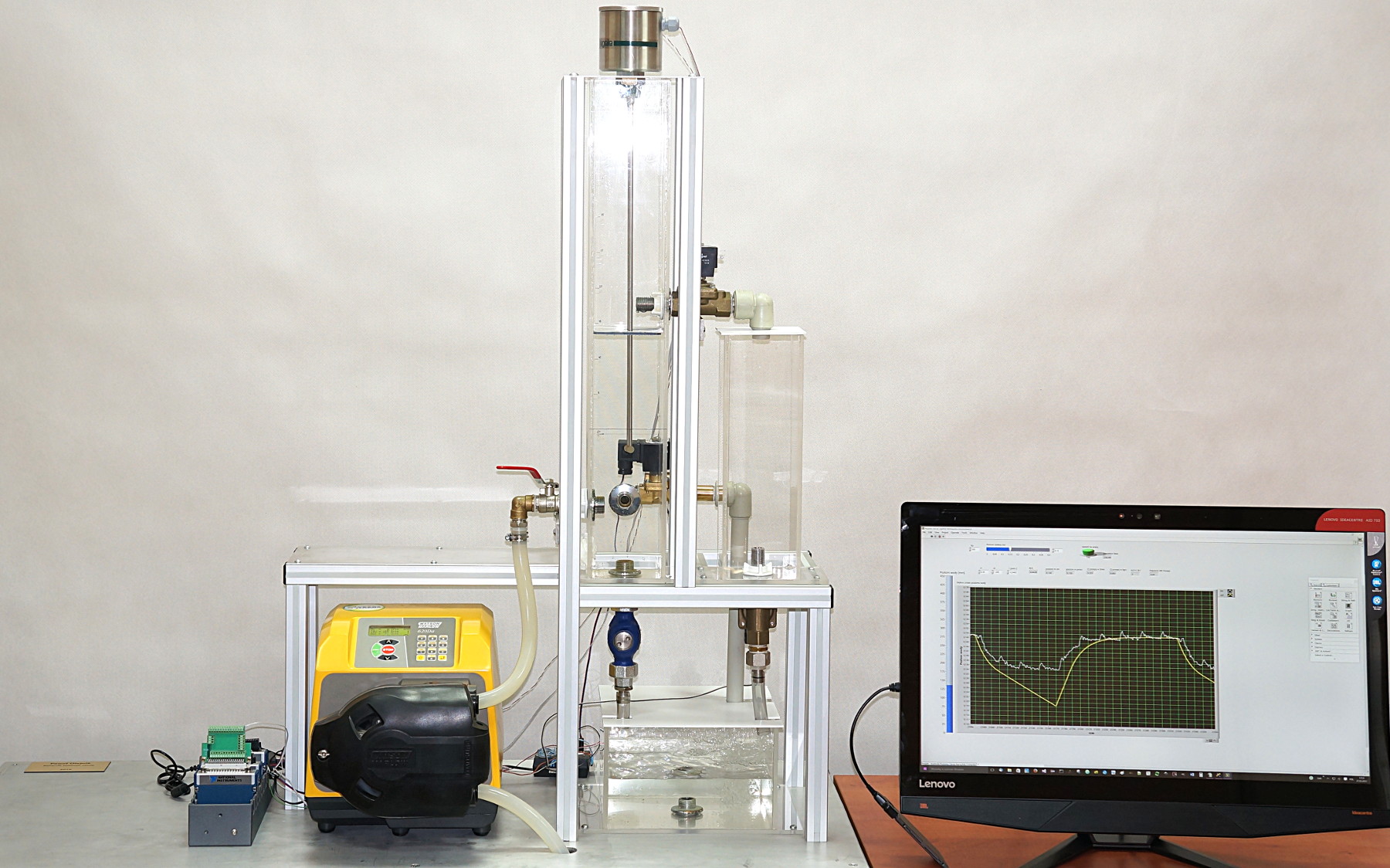
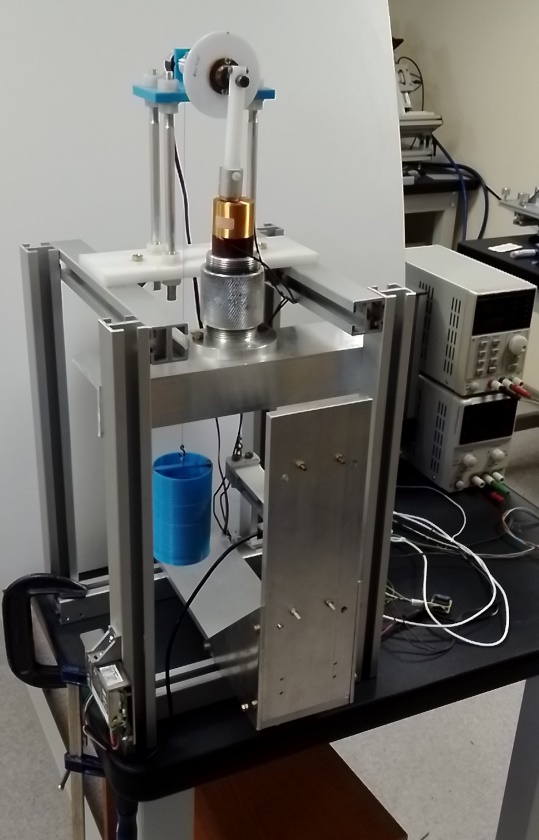
LAB 3. Liquid level control in a system of two connected tanks filled with water |
||
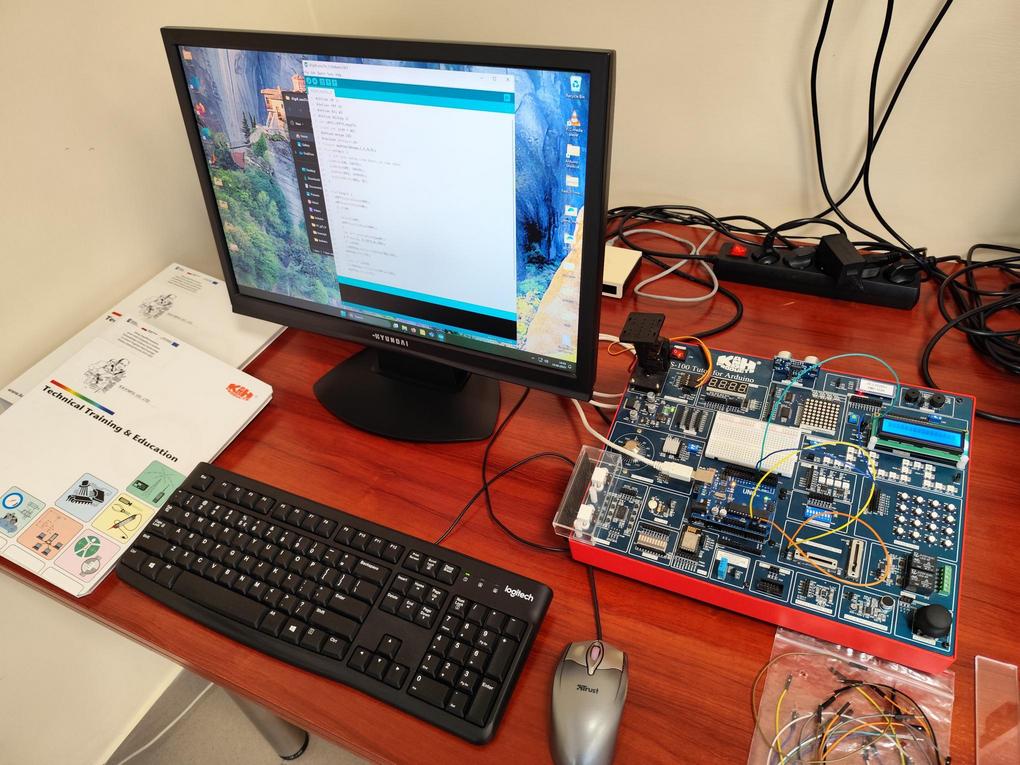
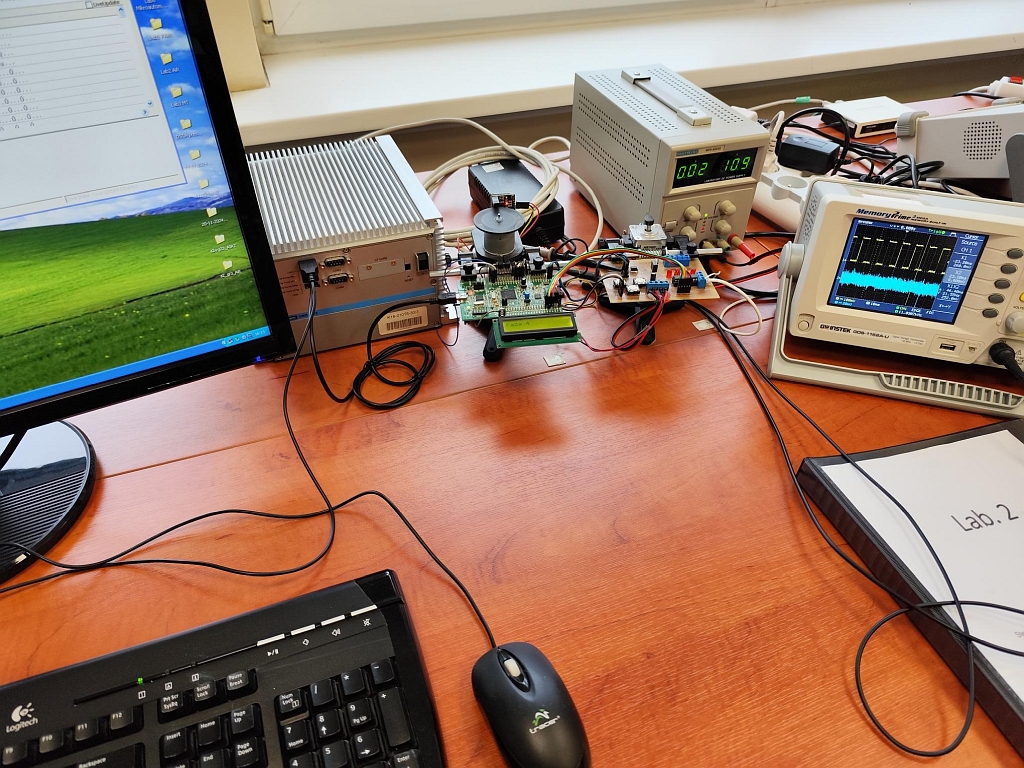
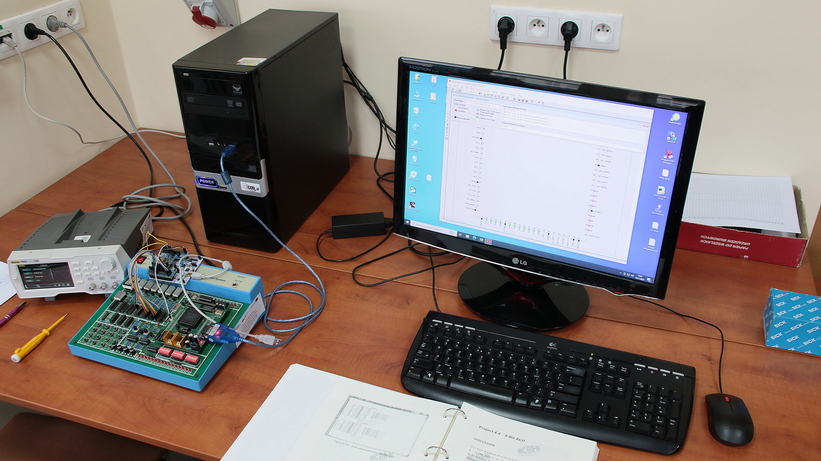
LAB 4. Controlling mechatronic devices and transmitting data on the Arduino UNO microcontroller test bench |
||
LAB 5. Designing arithmetic and logic circuits using the CPLD/FPGA digital circuit test set |
||
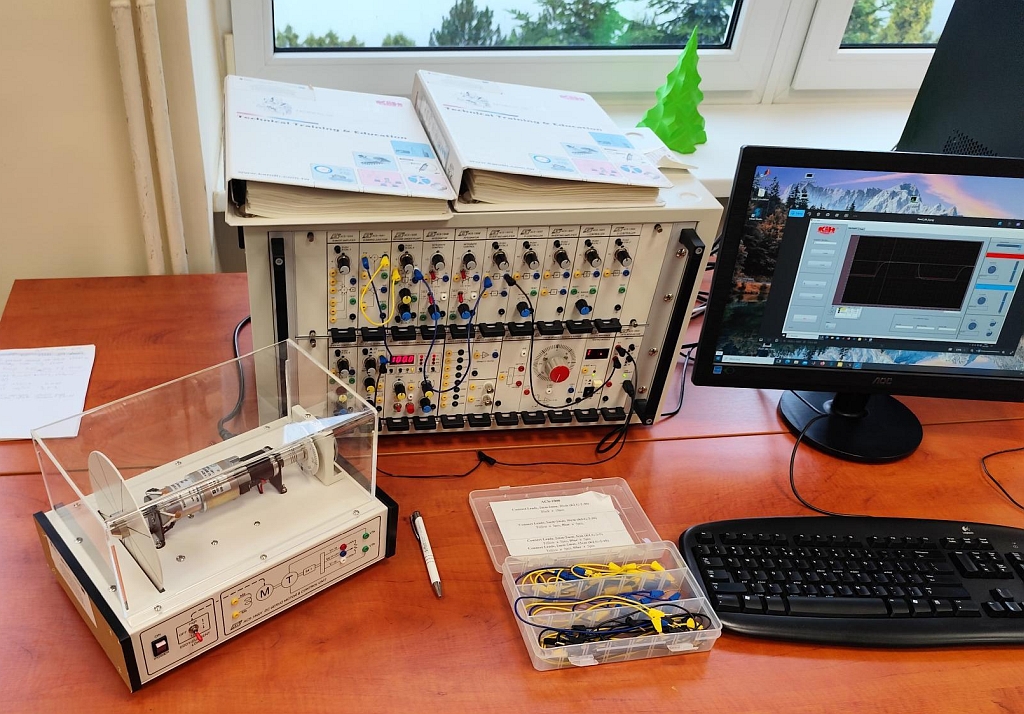
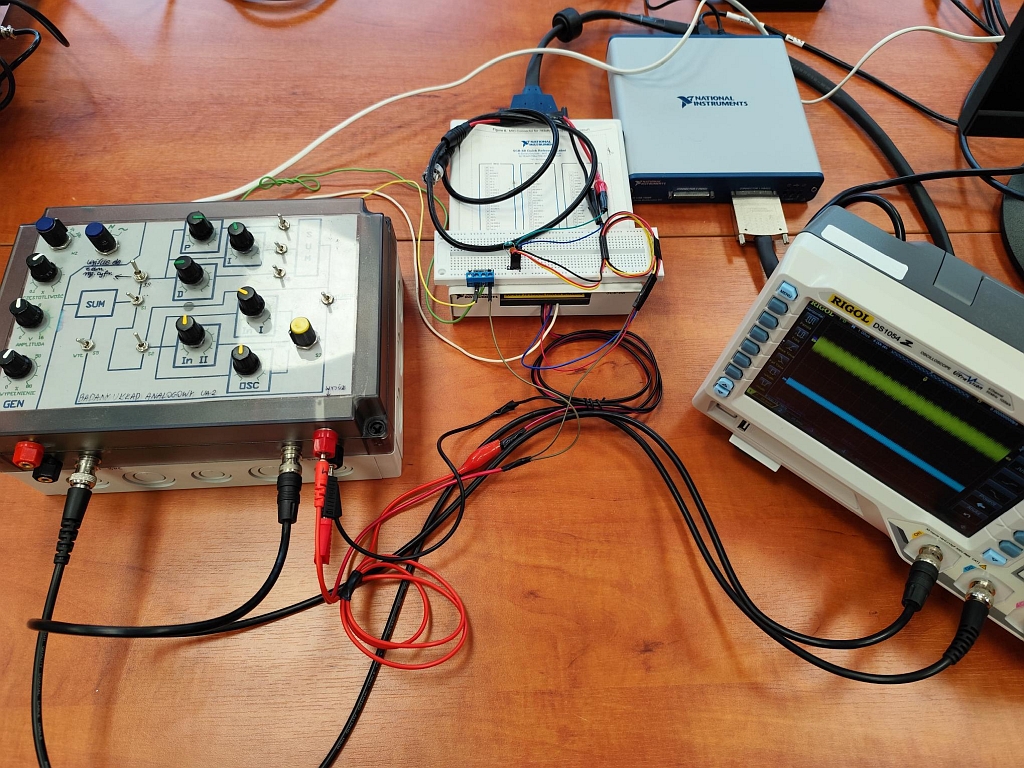
LAB 6. Analog modeling and control systems for linear dynamic systems |
||
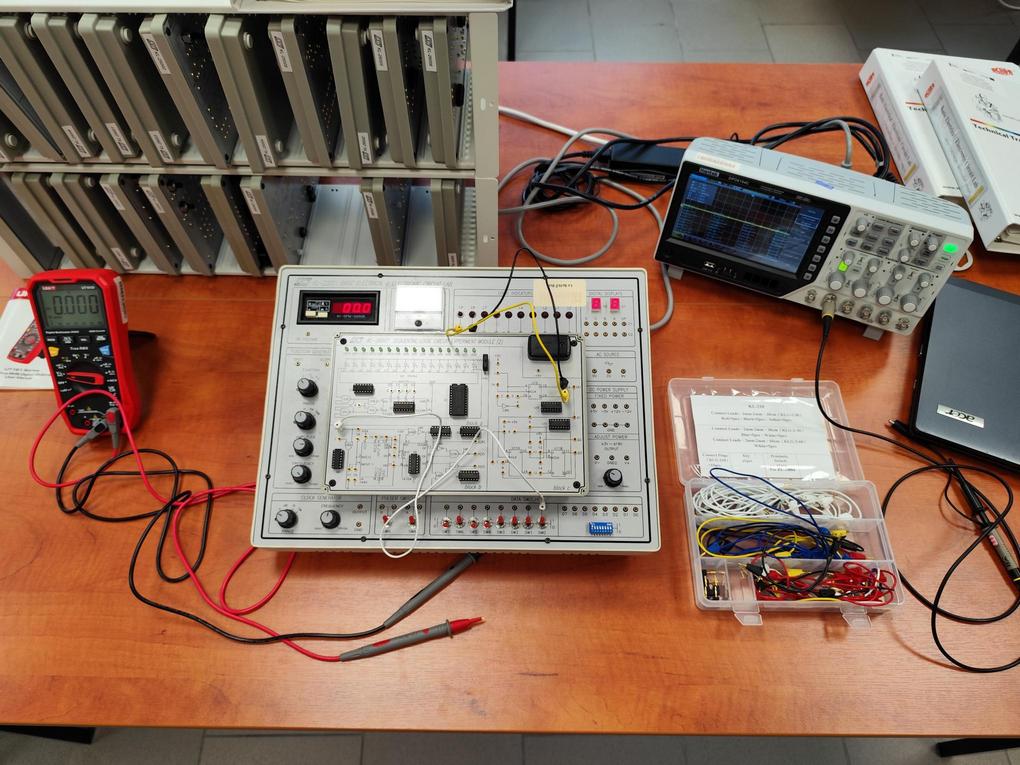
LAB 7. Static and dynamic responses on the KL-210 laboratory bench for testing sub-basic electrical/electronic systems |
||
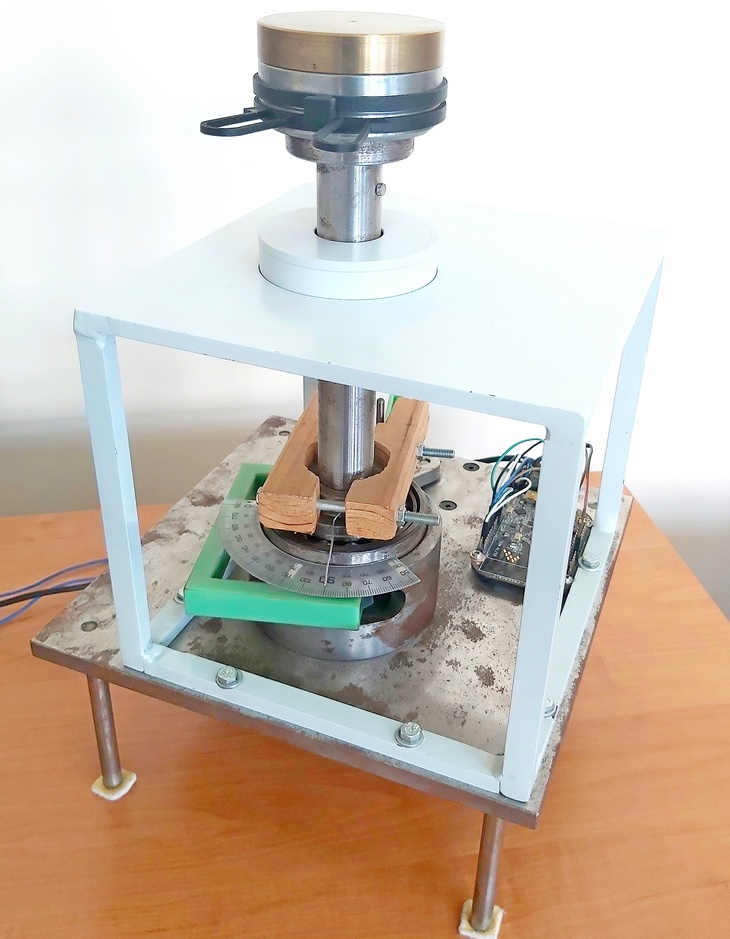
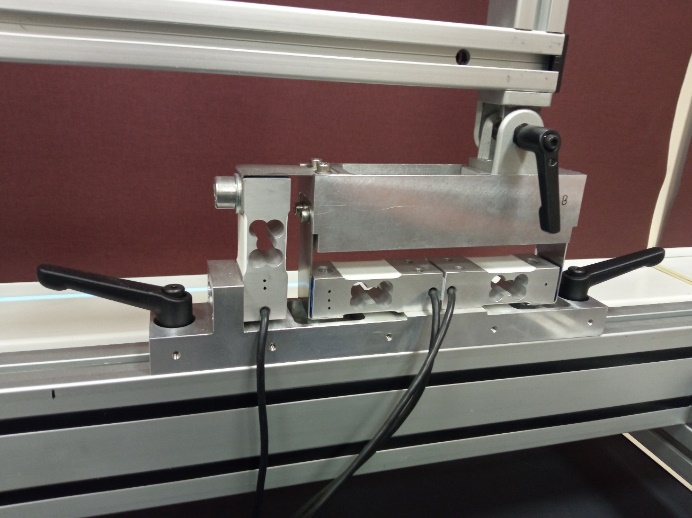
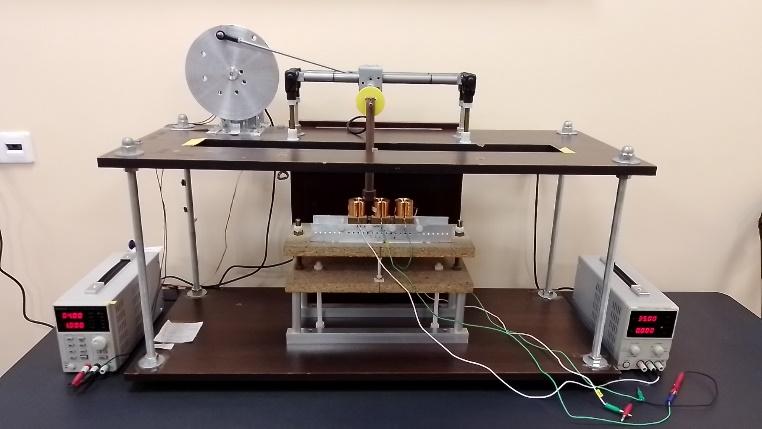
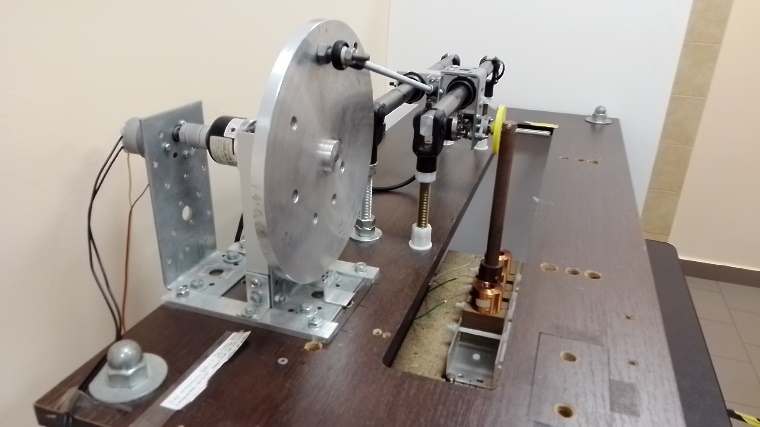
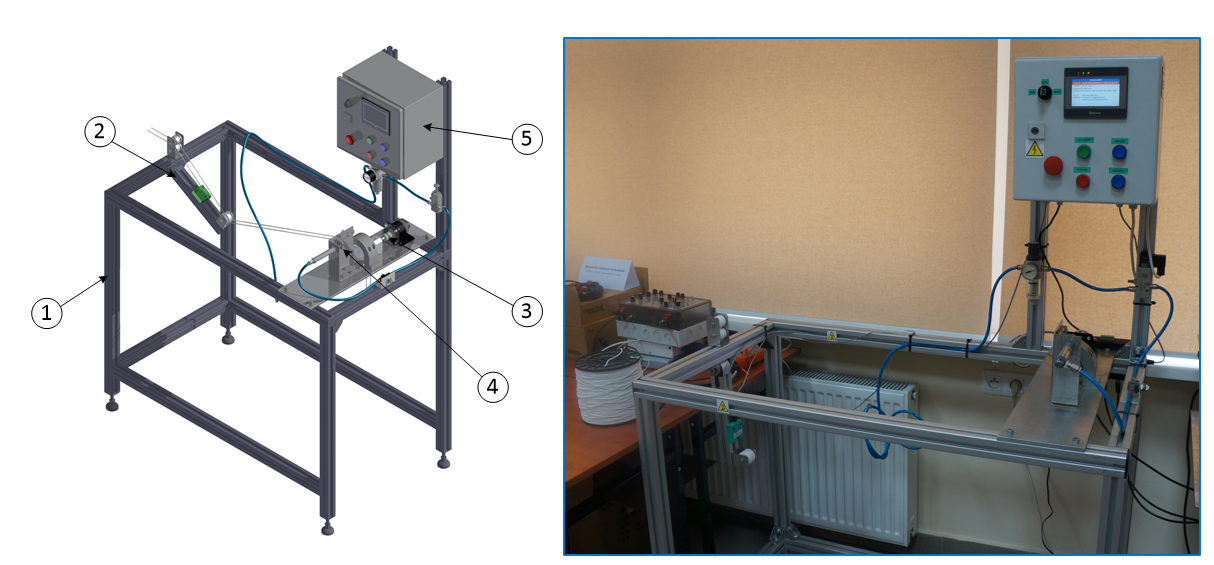
LAB 8. Mechatronic system for observation and testing of sliding friction (part A and B) |
||
LAB 9. Measurement and processing of electrical signals in mechatronic systems |
||
LAB 10. Analog automatic control system in cooperation with digital controller |
||
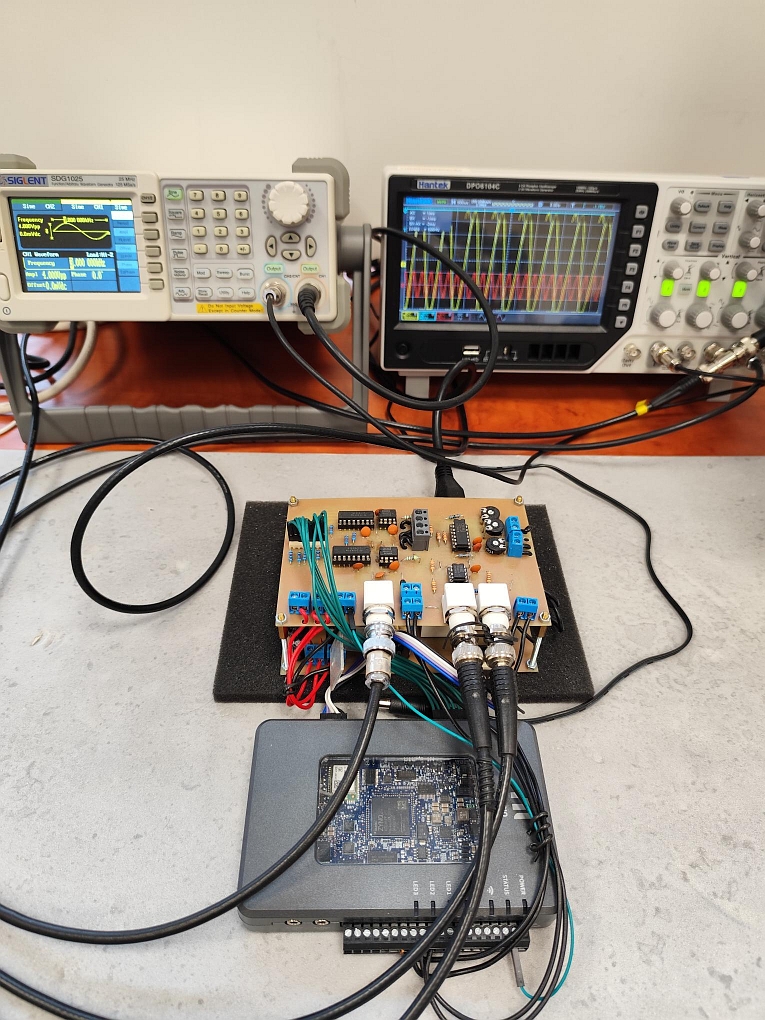
LAB 11. Selected electronic circuits of analog and digital signal filters in measurement and automation |
||
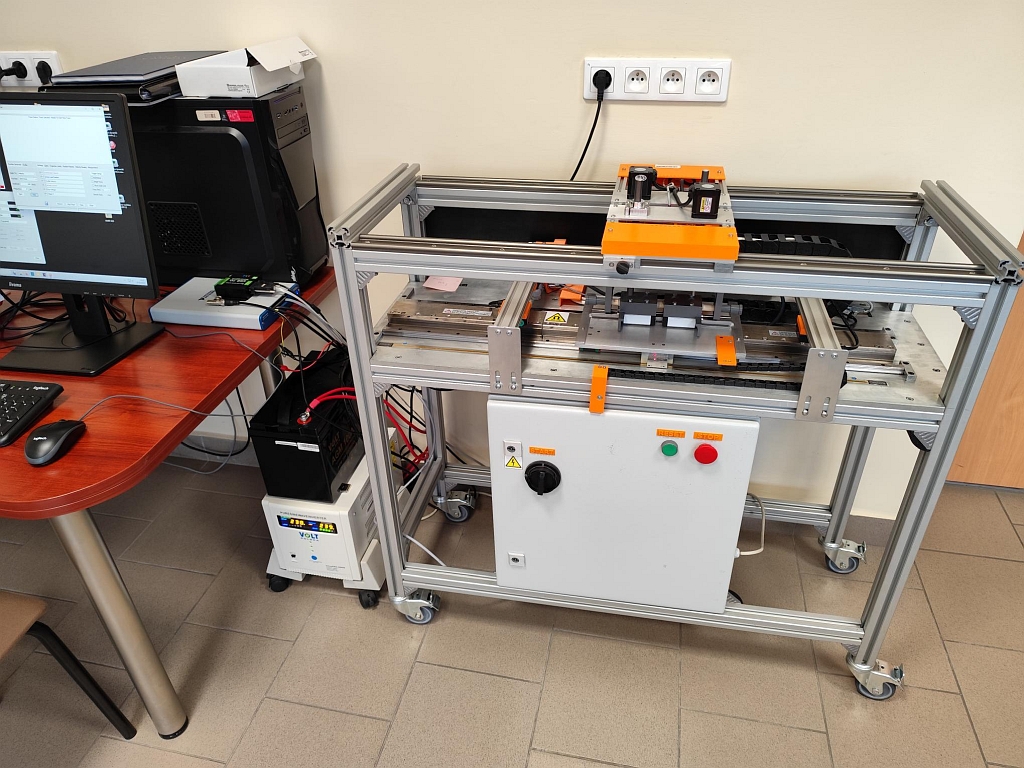
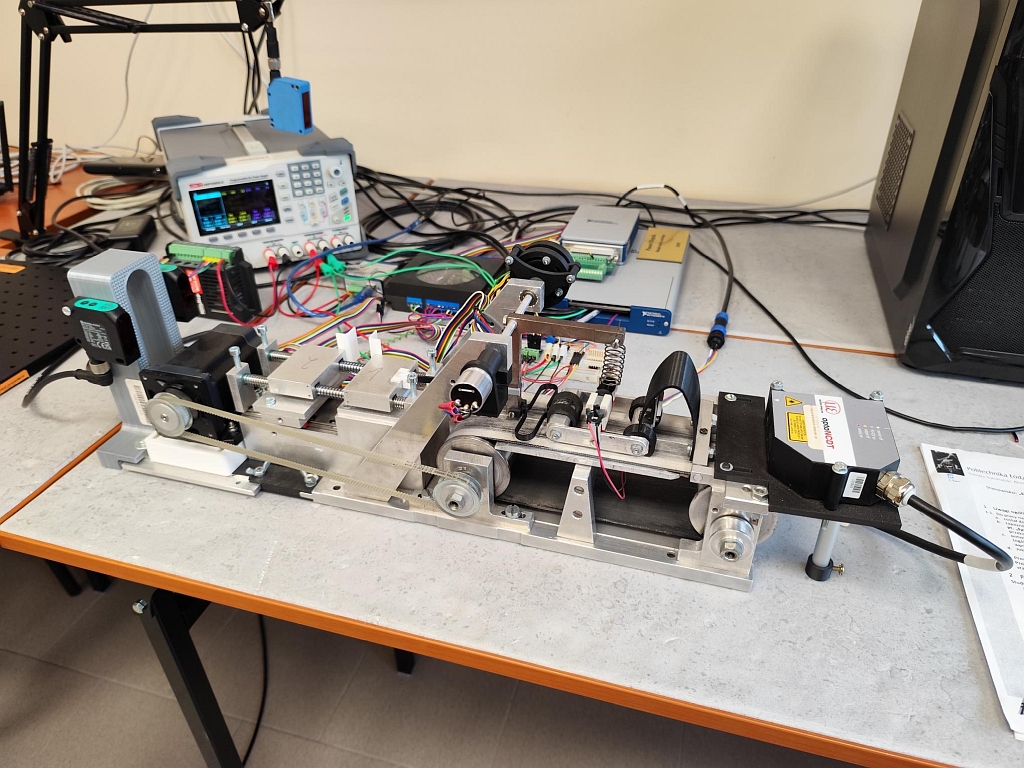
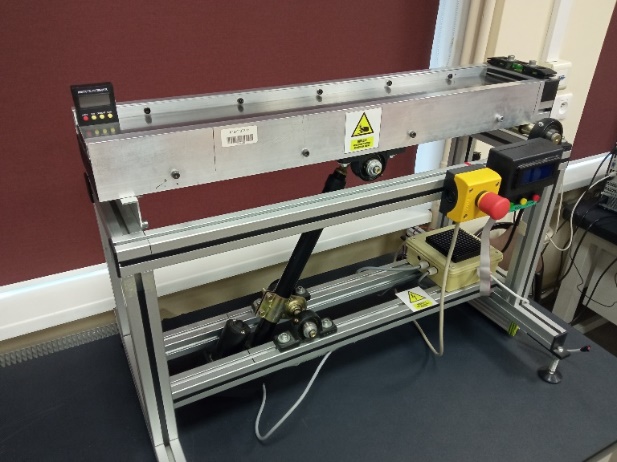
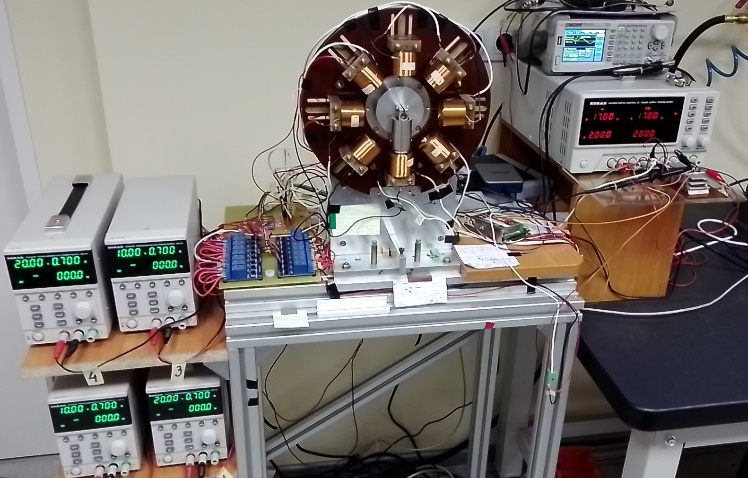
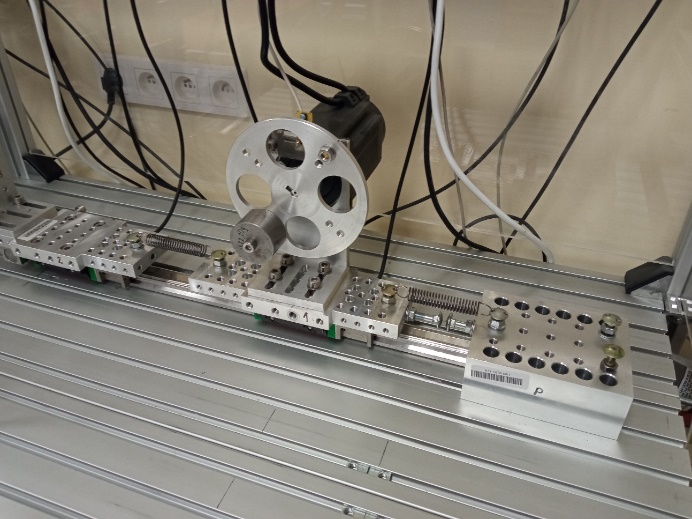
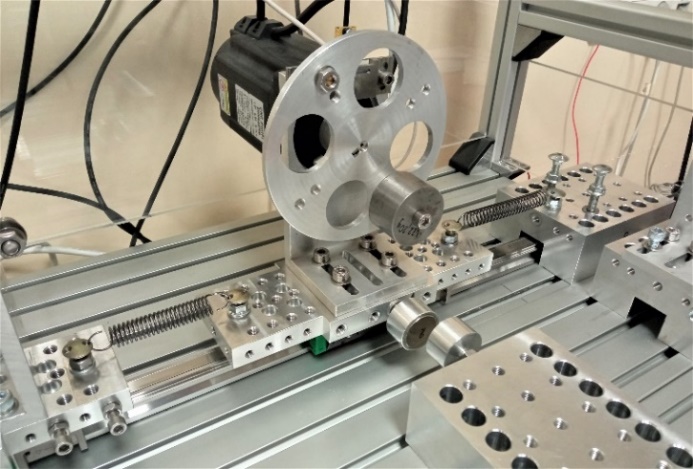
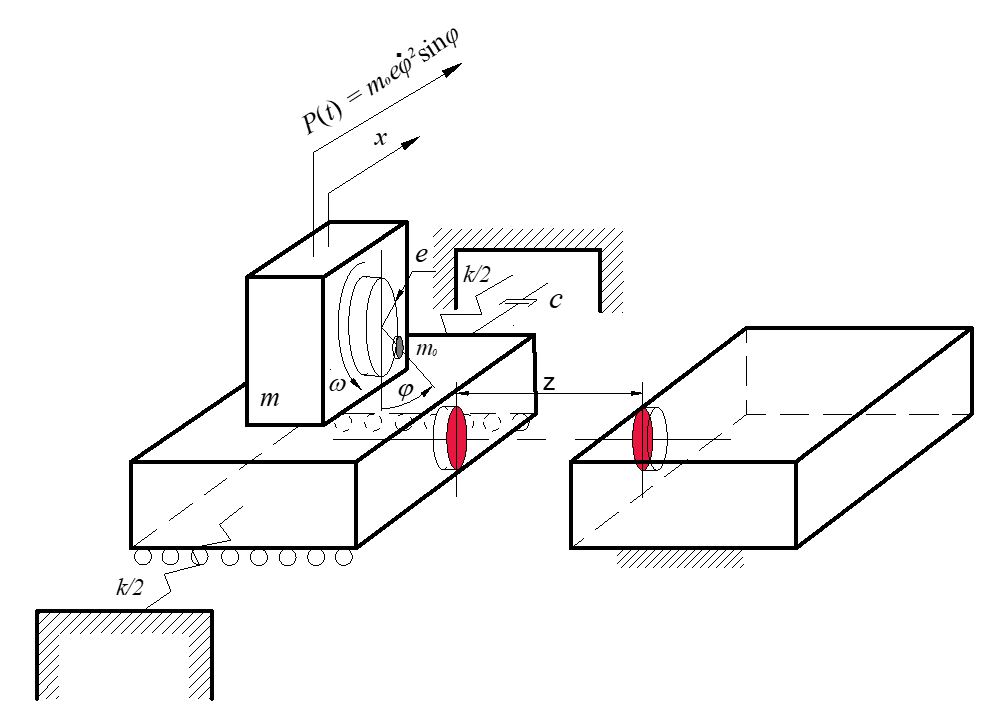
LAB 12. Selection of parameters of PID controller of position and speed trajectory control system of linear permanent magnet synchronous motor under variable friction load |
||
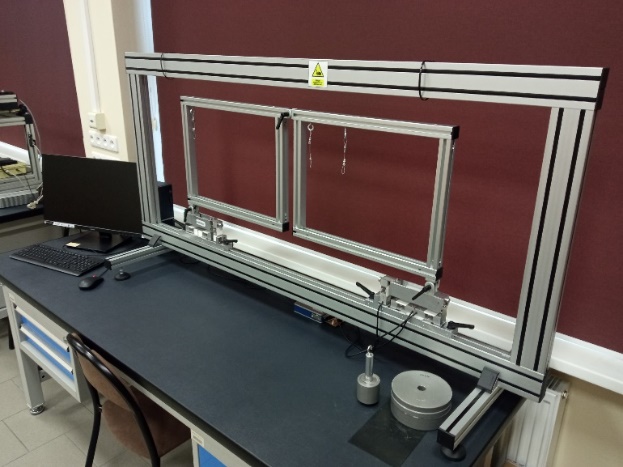
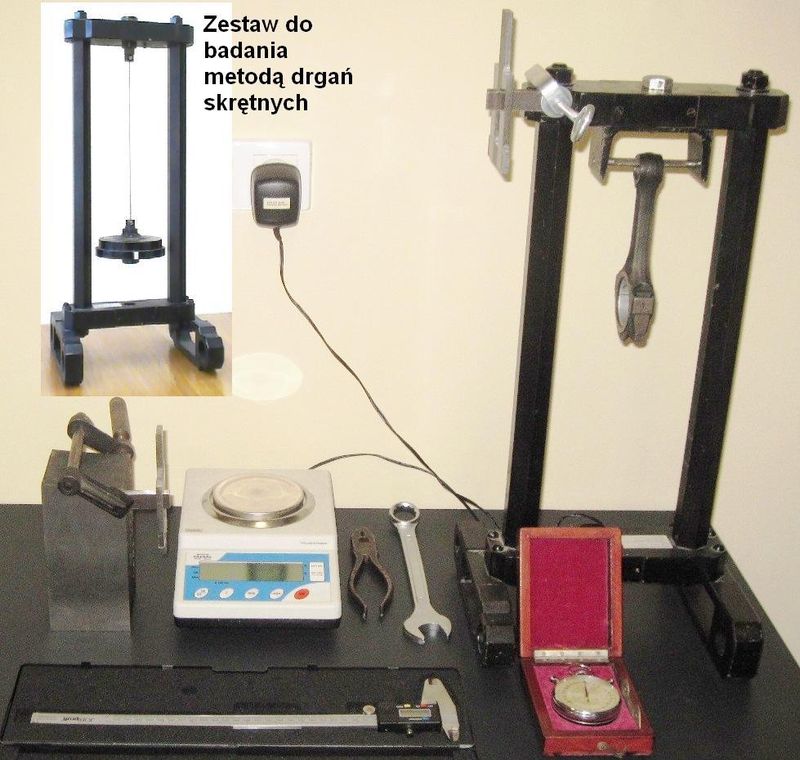
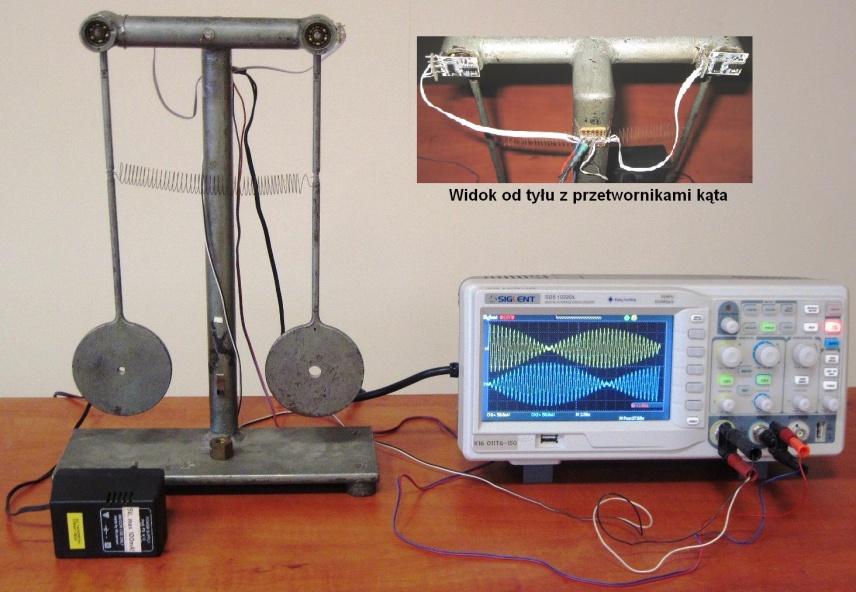
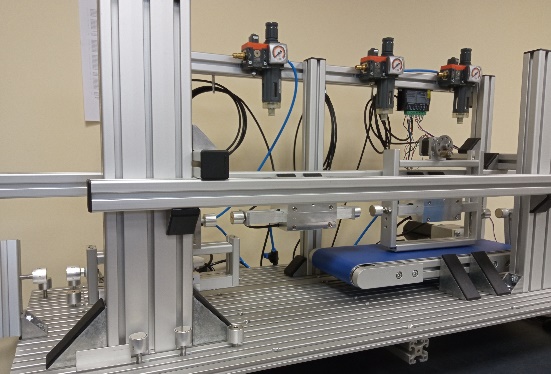
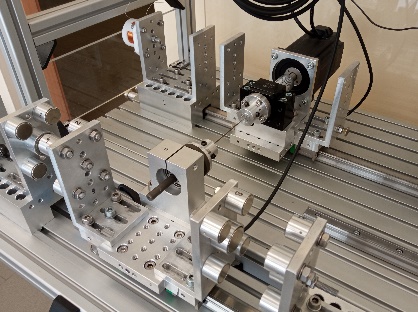
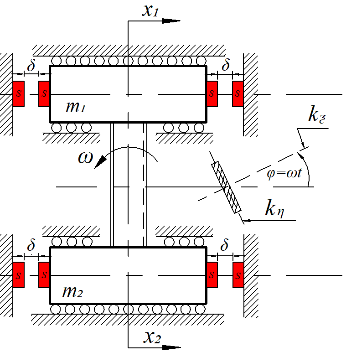
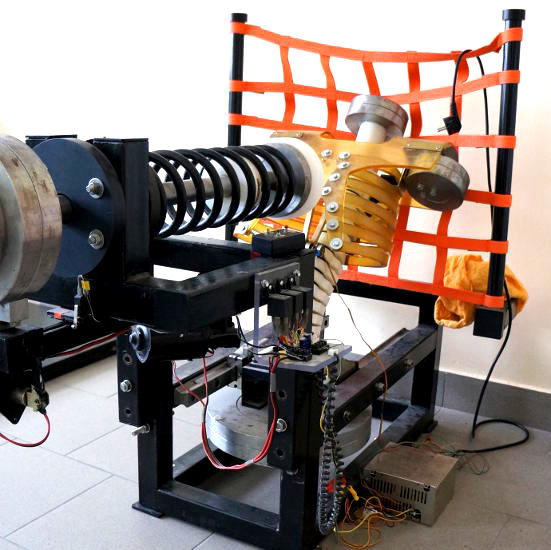
LAB 13. Registration and analysis of time trajectories of mechanical oscillations of a friction torsion pendulum in response to quasi-sinusoidal forcing |
||

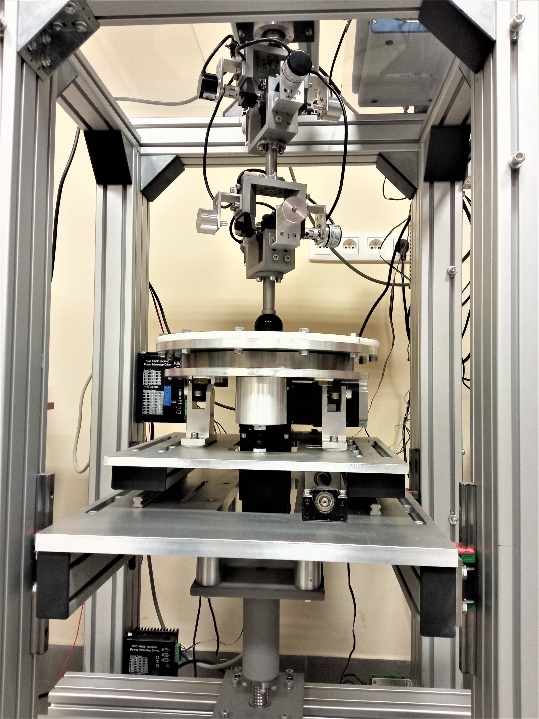
LAB 14. Position control of a camera mounted on a two-axis gimbal integrated into a robotic arm |
||
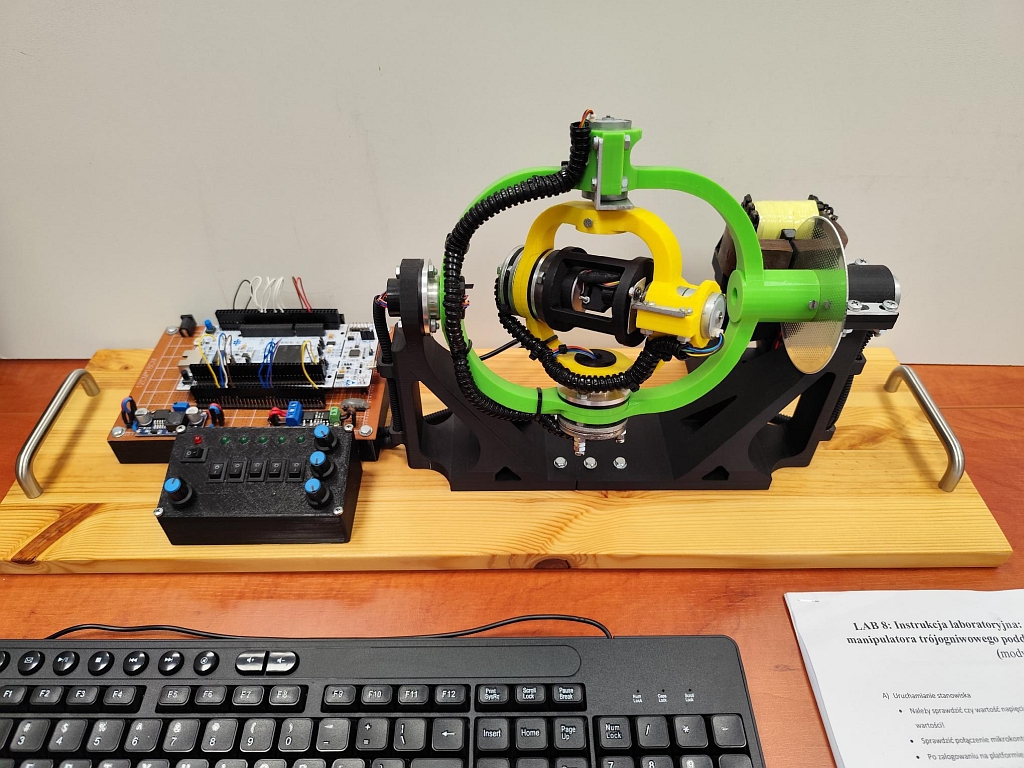
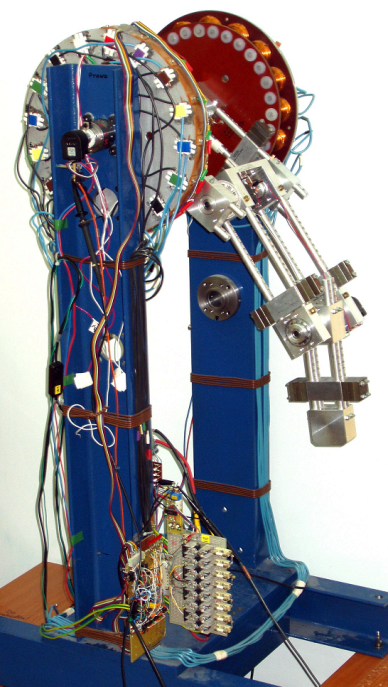
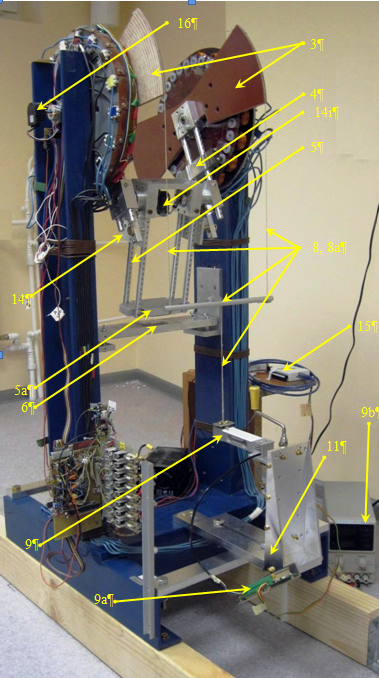
LAB 15. Position control of a three-axis gimbal with backlash |
||
0
Laboratory of Mechatronics II (2M323)

Supervisor: G. Wasilewski
Station |
Materials |
|
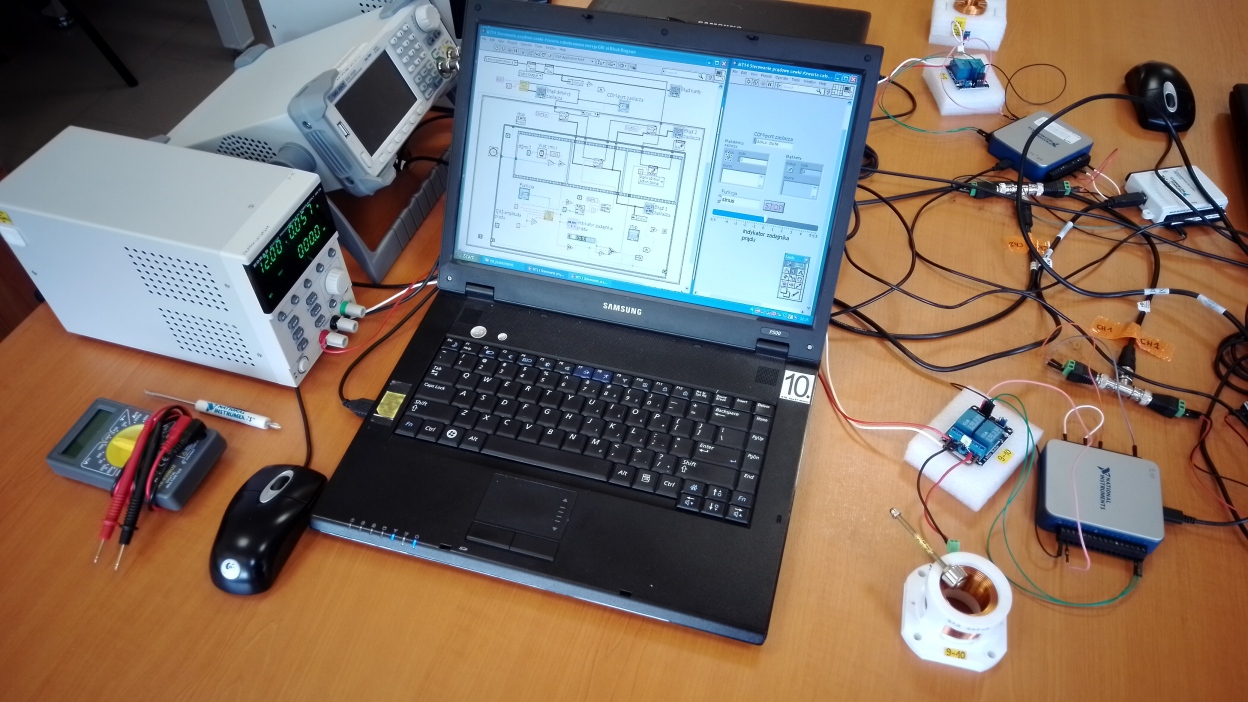
A single workstation with a computer, measurement card, controlled power supply, |
||
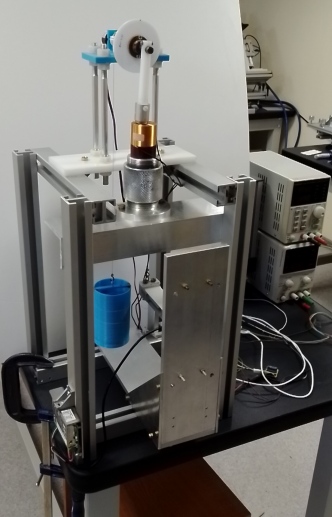
Physical pendulum |
||
0
Laboratory of Mechanics (2M336)

Supervisor: K. Witkowski
Station |
Materials |
|||
| 1 |
|
|||
| 2 |
|
|||
| 3 |
|
|||
| 3A |
|
|||
| 3B |
|
|
||
| 3C |
|
|||
| 3D |
|
|||
| 3E |
|
|||
| 4 |
|
|||
| 5 |
|
|||
| 6 |
|
|||
| 7 |

|
|||
| 8 |
|
|||
| 9 |
|
|||
| 10 |
|
|||
| 11 |
|
video | ||
| 12 |
|
|||
| 13 |
|
|
||
| 14 |
|
|||
| 15 |

|
|||
| 16 |
|
|||
| 17 |

|
|||
| 18 |
|



0
Laboratory of Automation (2M331)

Supervisor: K. Polczyński
Stations |
Materials |
|
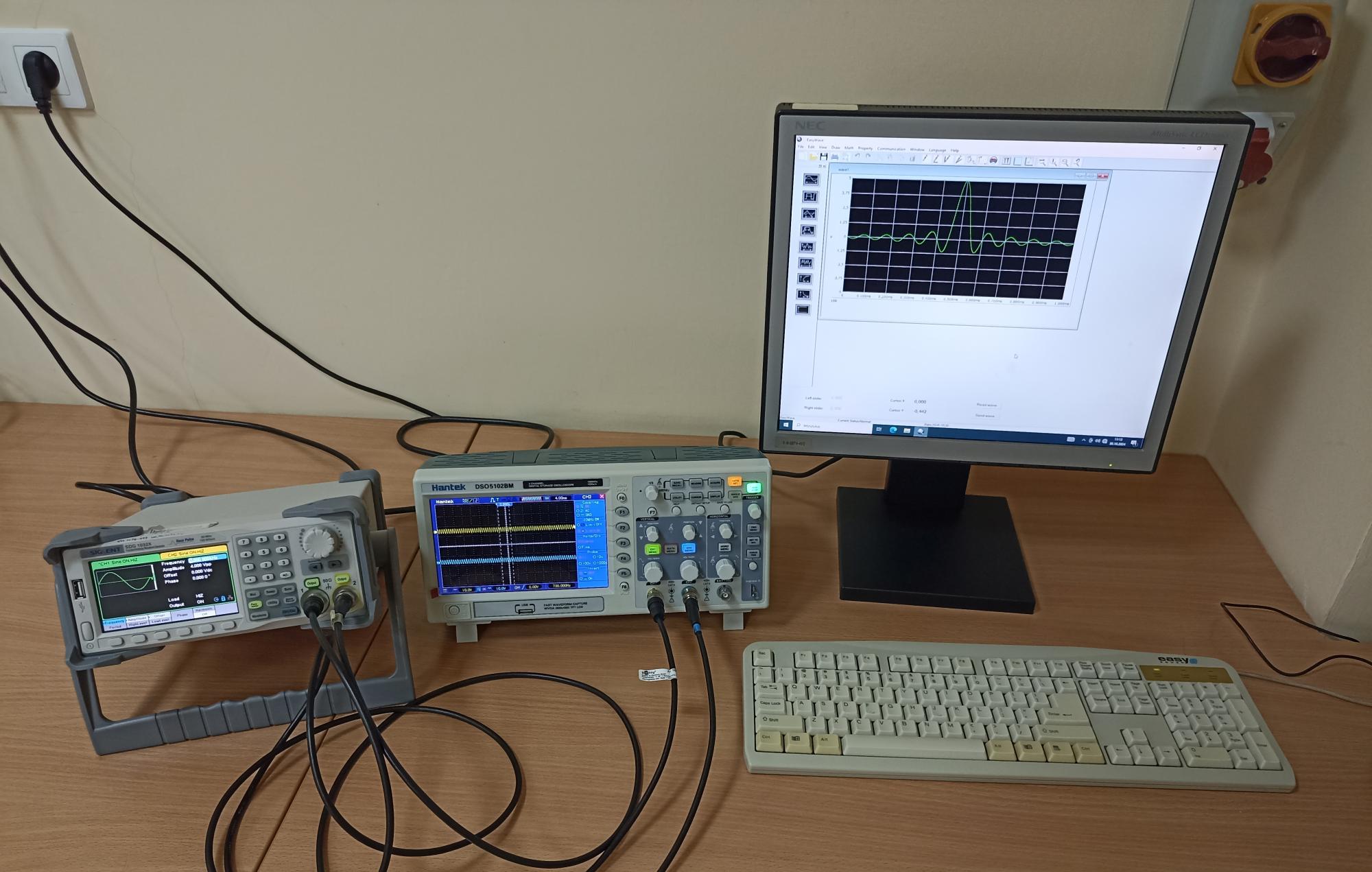
1. Oscilloscope and signal generator operation |
||

2. Study of basic automation elements |
||

3. Study of the continuous control system |
||

4. Study of the discontinuous control system |
||

5. Study of the follow-up system |
||
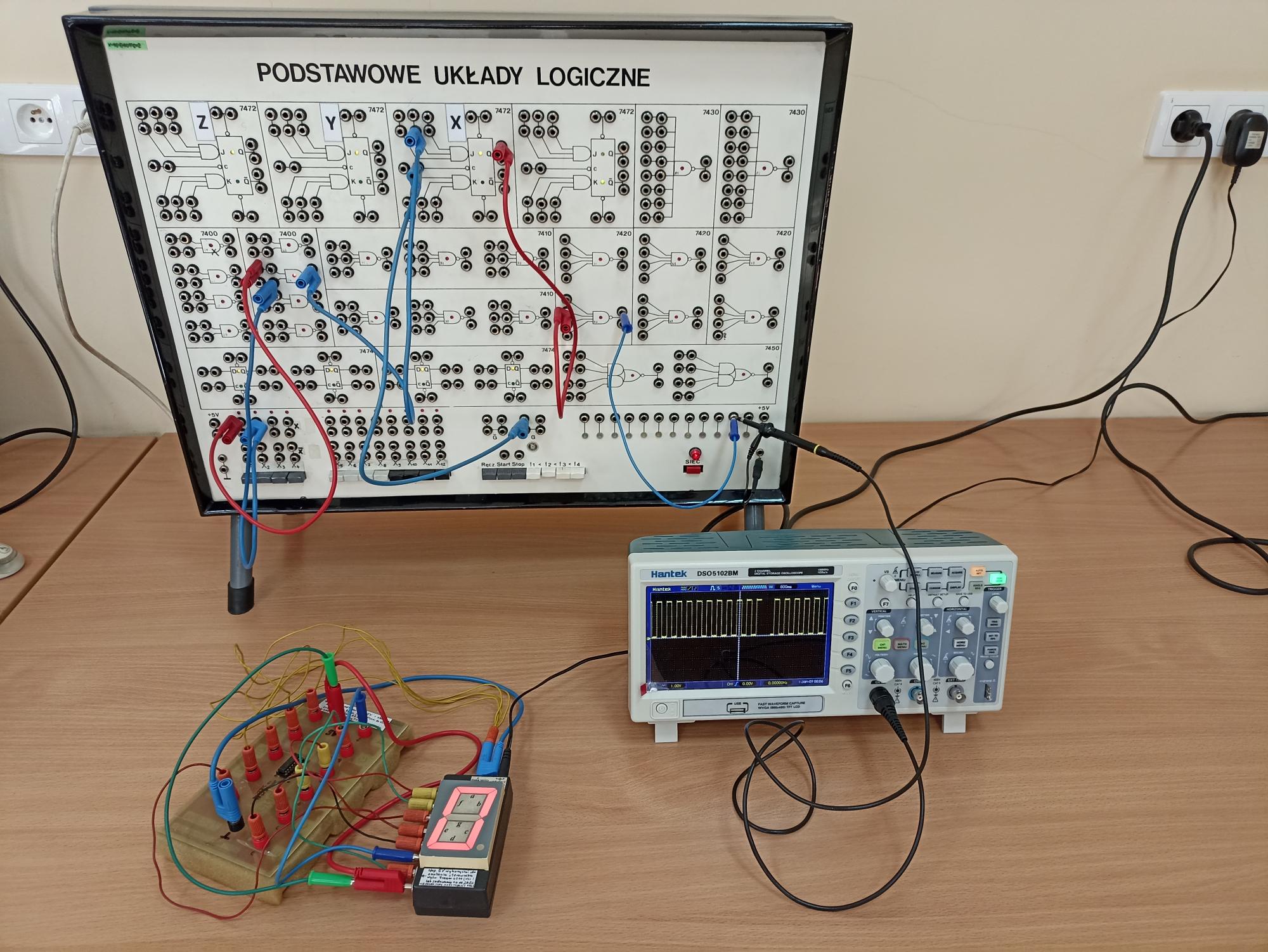
6. Study of combinational and sequential logic systems |
||
7. Study of Moore's machine |
||
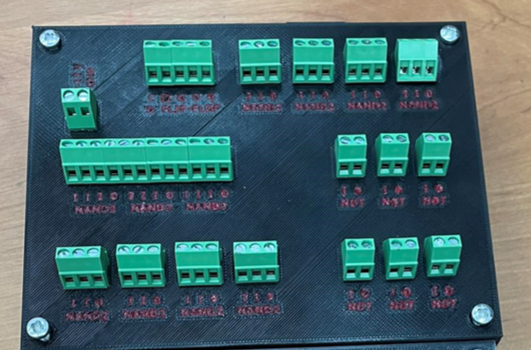
8. Study of static gambling in combinational and sequential systems |
||

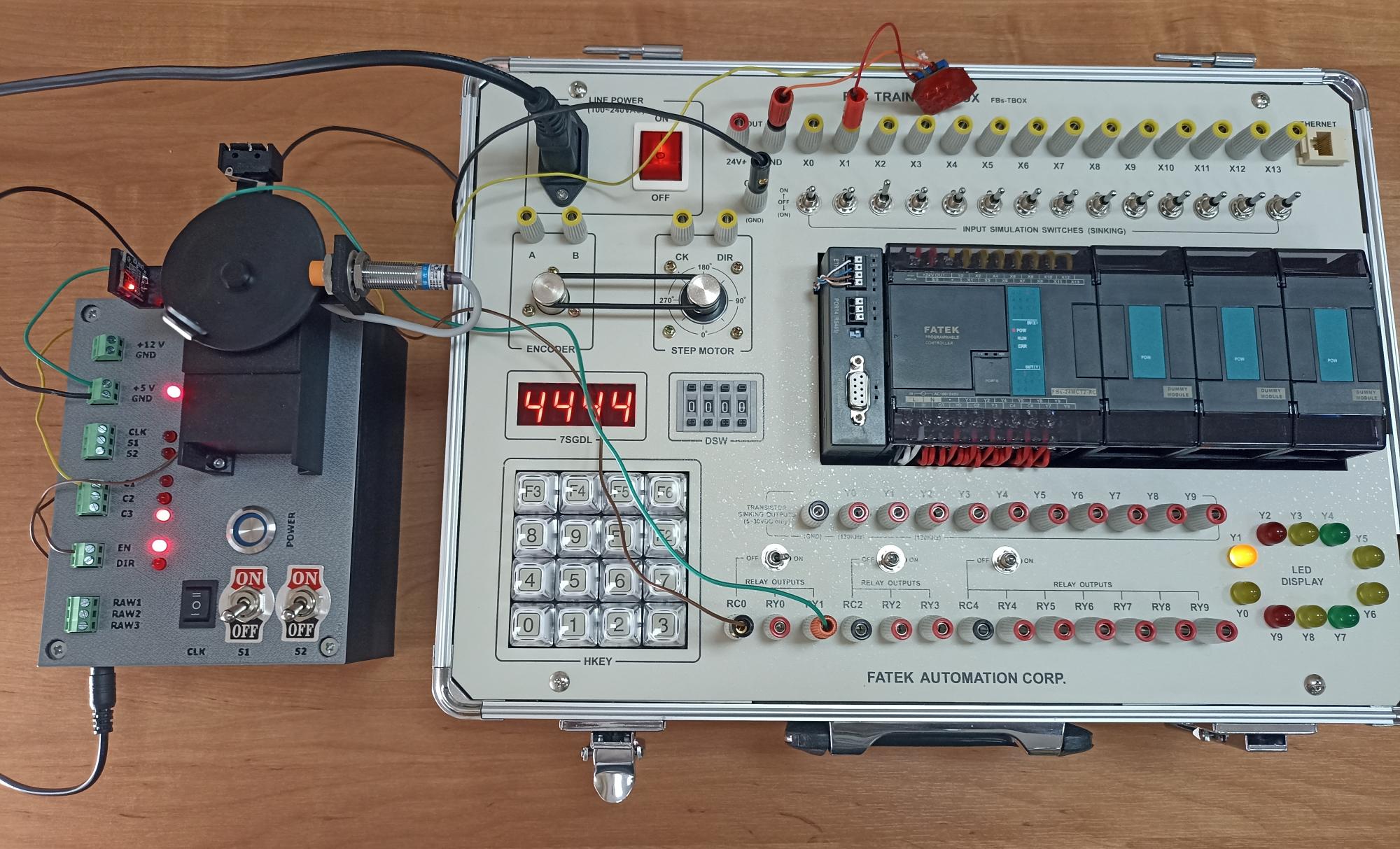
9. Control of belt feeder using PLC controller |
||

10. Projektowanie wizualizacji systemu transportującego przy użyciu panelu operatorskiego HMI firmy Weintek w środowisku EasyBuilder 8000 |
||
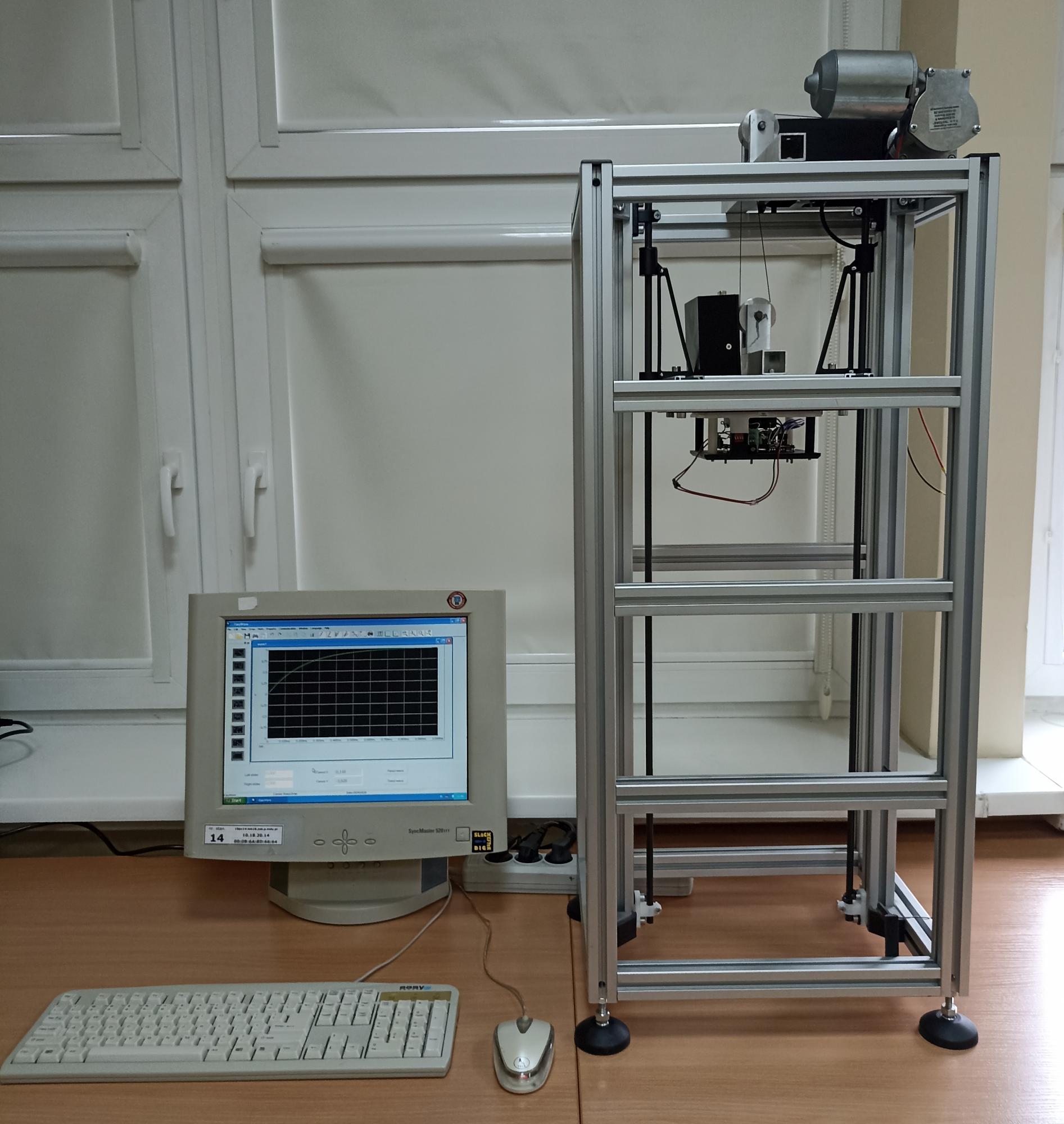
11. Study of the control and dynamics of the lift model |
||
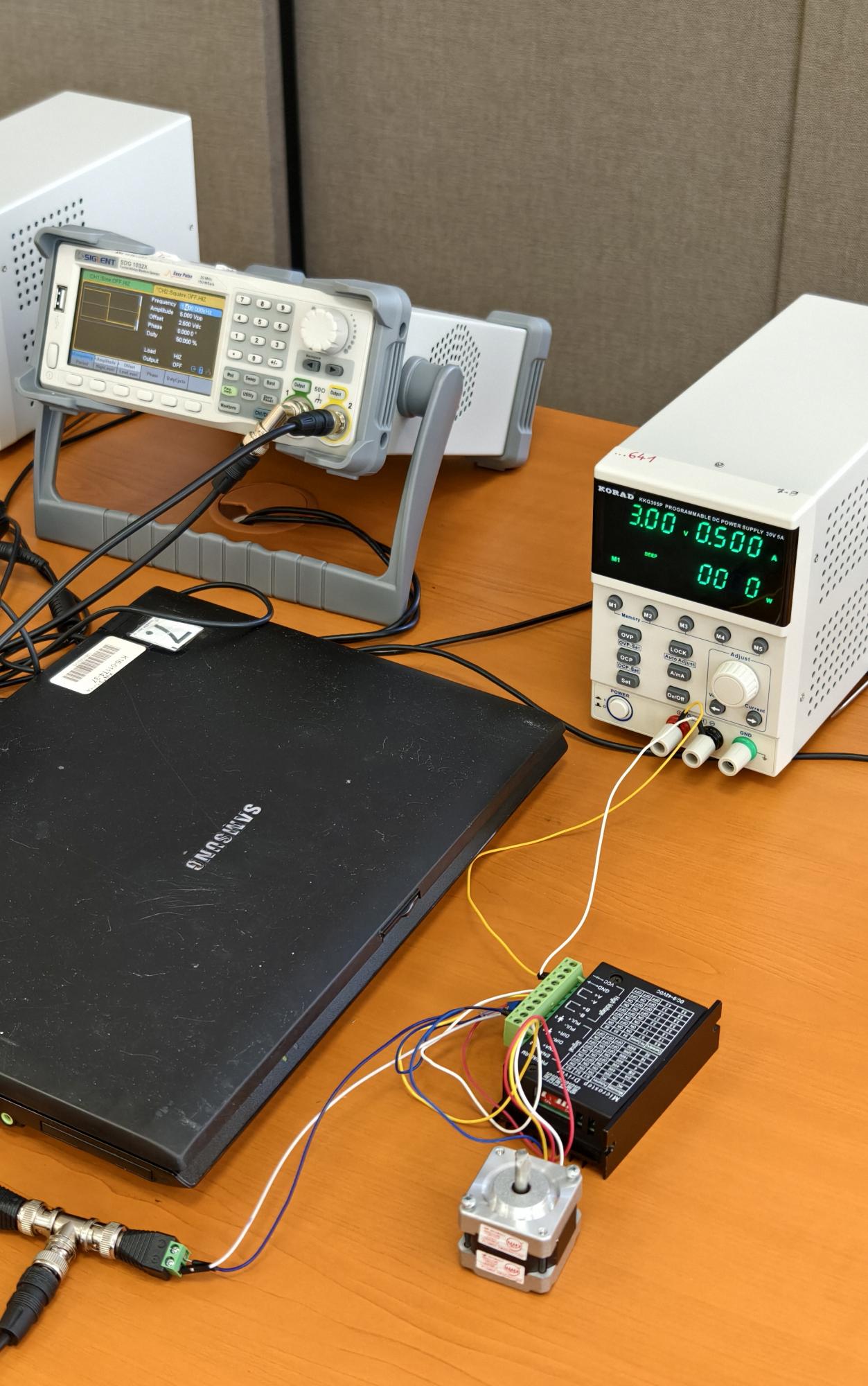
12. Stepper motor control |
||
13. Analysis of a mechatronic system for cutting a cable |
||
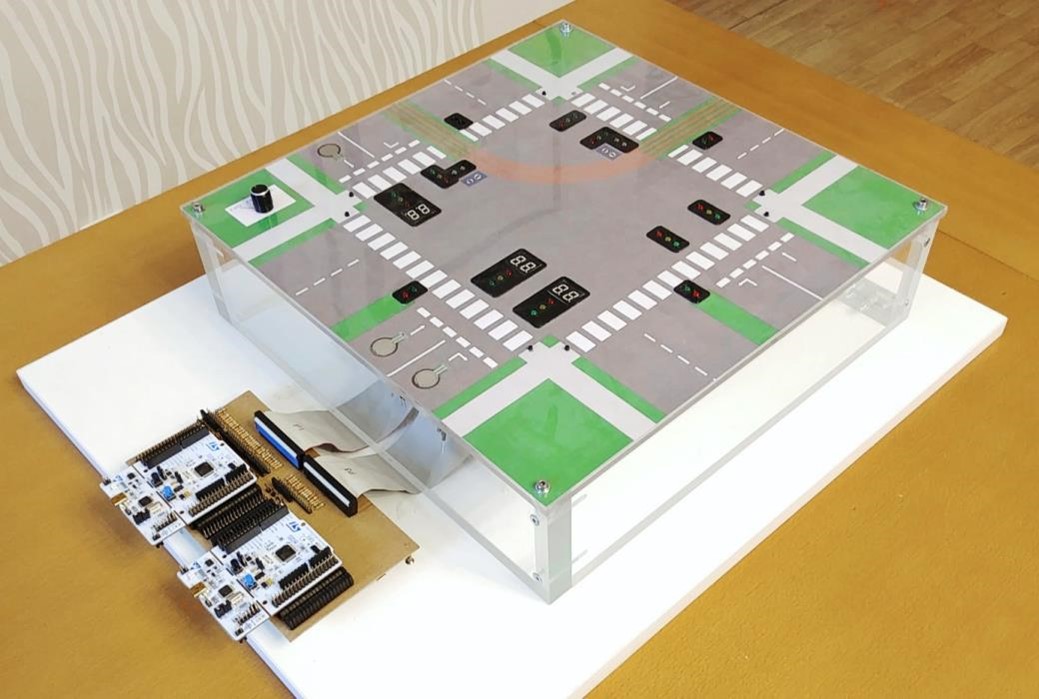
14. Traffic light control |
||

15. Compensation for non-ideal transmission of a belt drive in a system with a stepper motor and encoder |
||
0
Laboratory of Biomechanics (2M337)

Supervisor: B. Zagrodny
Station |
Materials |
|

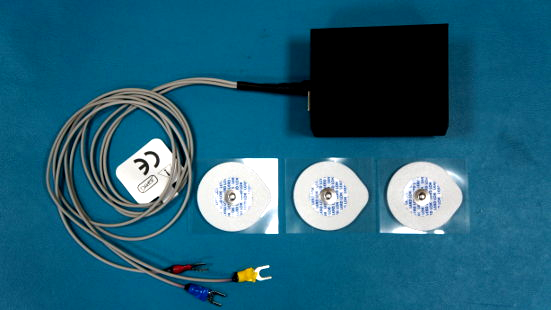
Heart ECG, recording of electrical signals from the human body |
||

Air and bone conduction, speech audiometry |
||

Cardiopulmonary resuscitation CPR |
|
|

Measurement and diagnosis of venous and arterial blood pressure |
||
Auscultation of the lungs, first and second heart sounds, pulse examination, lung sounds |
||

Thermal imaging camera |
||

Ground reactions during walking, running, analysis of postural stability |
||
Optoelectronic system for analysis and recording of movement (Motion capture) |
||
Pneumatic control, solenoid valves, control system |
||
Simulation of impact on the chest model |
||

Study of the characteristics of pneumatic (feathered) muscles |
||
Surface electromyography: Functioning of the muscular system, cooperation of single- and multi-joint muscles, compensation and stabilization of movement |
||

Determining the center of gravity of the human body |
||

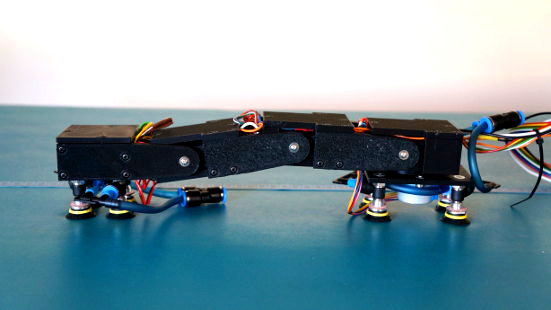
Application of the algorithm to the movements of a winding snake |
||
Study of the walking mechanism on different substrates |
||

Gait programming |
||

Examination of the range of limb movement and workspace using the SFTR method |
||

Spirometer |
||

Testing the strength of the skull orbit |
||
0
Computer Science Laboratory (2M135)

Supervisor: M. Ludwicki
0
Hexapod Laboratory (2M323)

Supervisors: P. Olejnik, G. Wasilewski
0
Student Project Workshop (2M133)

Supervisors: A. Wijata, M. Kaźmierczak
0
Mechanical Workshop (2M131)

Supervisors: A. Wijata, M. Kaźmierczak
0
Electrical Workshop (2M132)

Supervisors: A. Wijata, M. Kaźmierczak
0
Conference Hall (2M334)

Supervisor: M. Bednarek
0